

Underactuation tail end tool of apple picking robot
A technology for picking robots and end tools, which is applied to picking machines, manufacturing tools, agricultural machinery and implements, etc., can solve problems such as complex mechanical structures and achieve the effect of simple structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The underactuated terminal tool of the apple picking robot of the present invention will be described in detail below in conjunction with the embodiments.
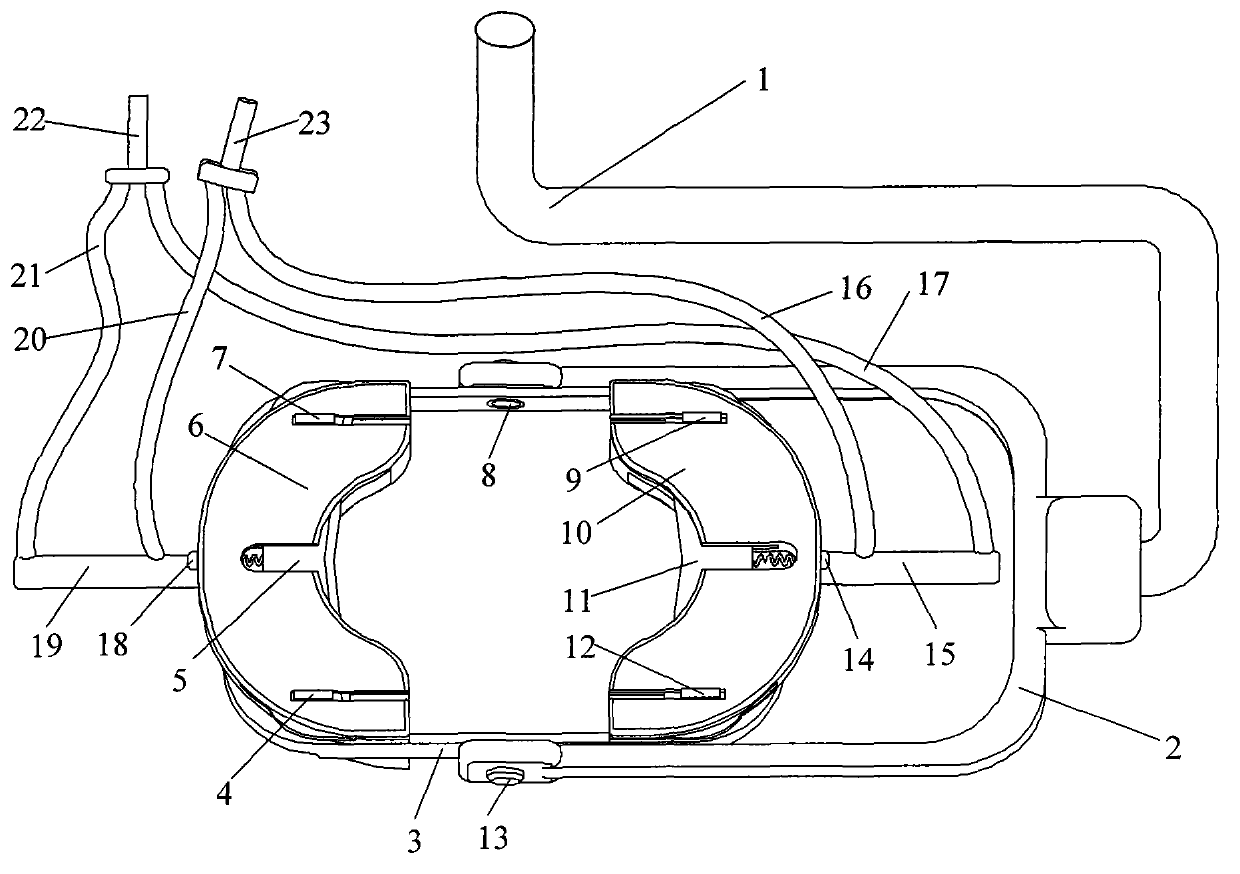
[0031] Such as figure 1 As shown, the underactuated terminal tool of the apple picking robot of the present invention includes: a fruit posture adaptive mechanism, and a fruit separation and cutting mechanism. It is characterized in that the fruit separation and cutting mechanism is placed in the fruit posture self-adaptive mechanism, and the fruit posture self-adaptive mechanism can be installed on the positioning mechanism of the apple picking robot.
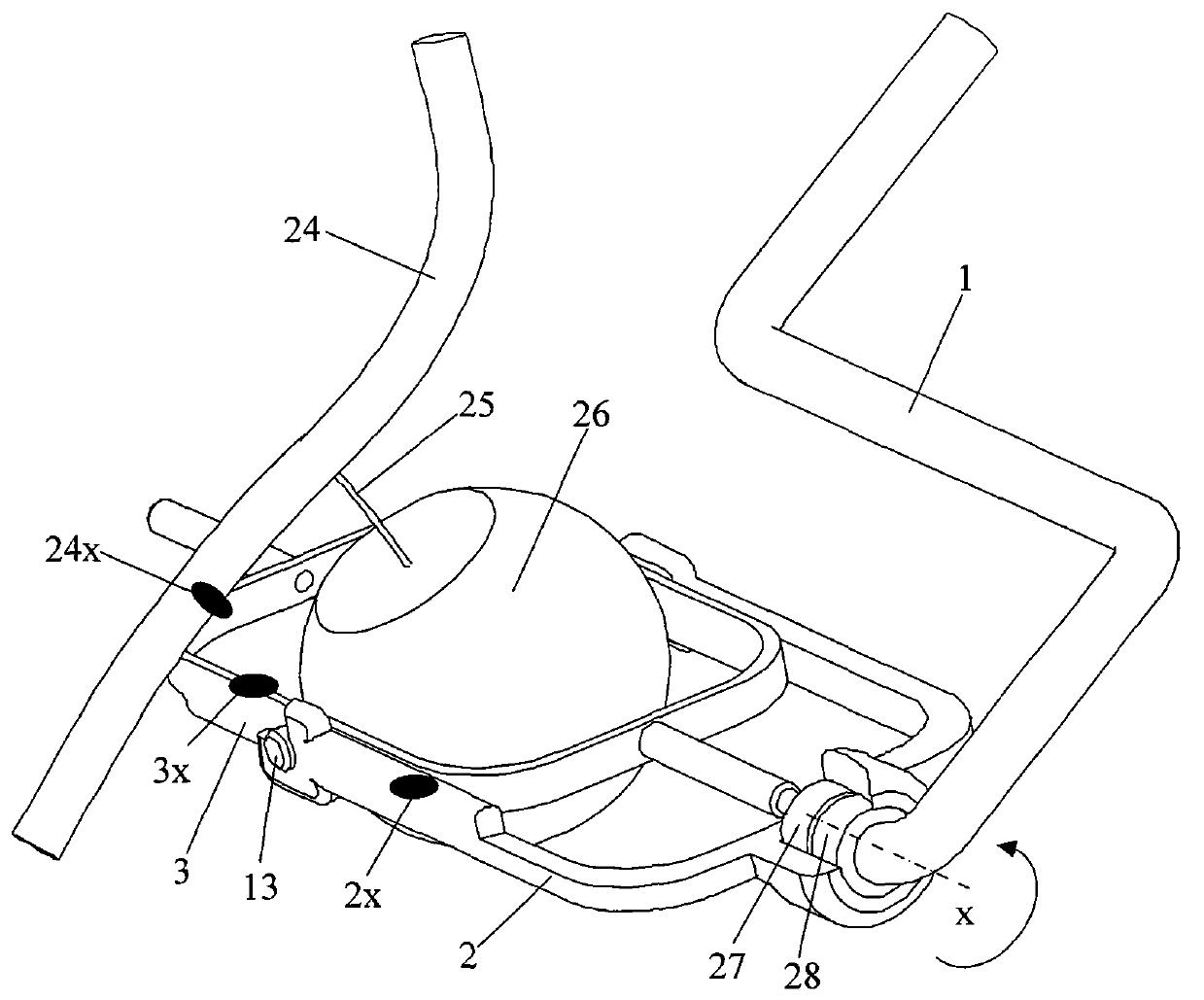
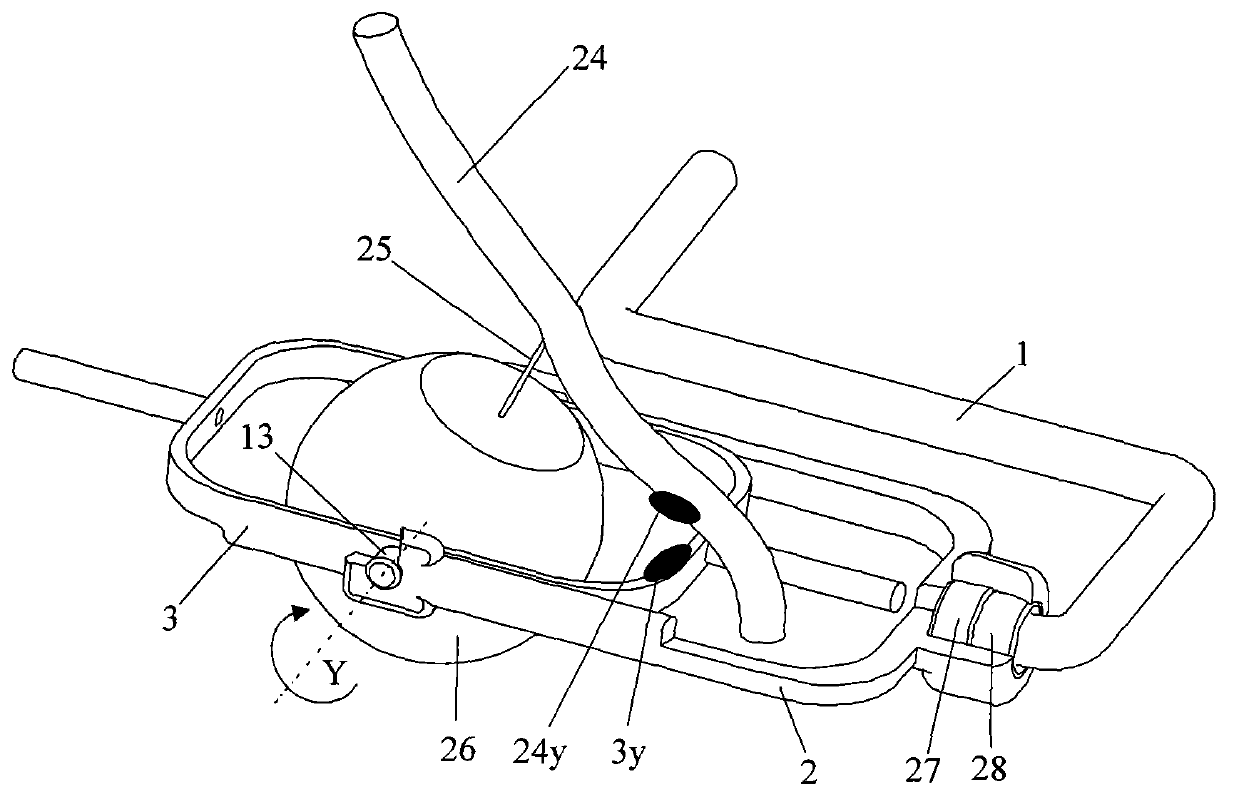
[0032] Such as figure 2 , 3 As shown, the fruit attitude adaptive mechanism includes: a support 1; an outer frame 2 hinged to the support 1 through a bearing I27 and a bearing II28; an inner frame 3 hinged to the outer frame 2 through a pin I8 and a pin II13.
[0033] Such as Figure 4 Shown, fruit separation, cutting mechanism comprises: inner frame 3; The lef...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More