

Active compliance robot grinding system with controlled pressure and changeable speed and method
An active, flexible and robotic technology, applied in the field of grinding and polishing, it can solve the problems of large deviation between the actual value of the pressure and the theoretical value, damage to the surface of the workpiece, and slow response to the adjustment of the working pressure, so as to avoid nonlinear distortion errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
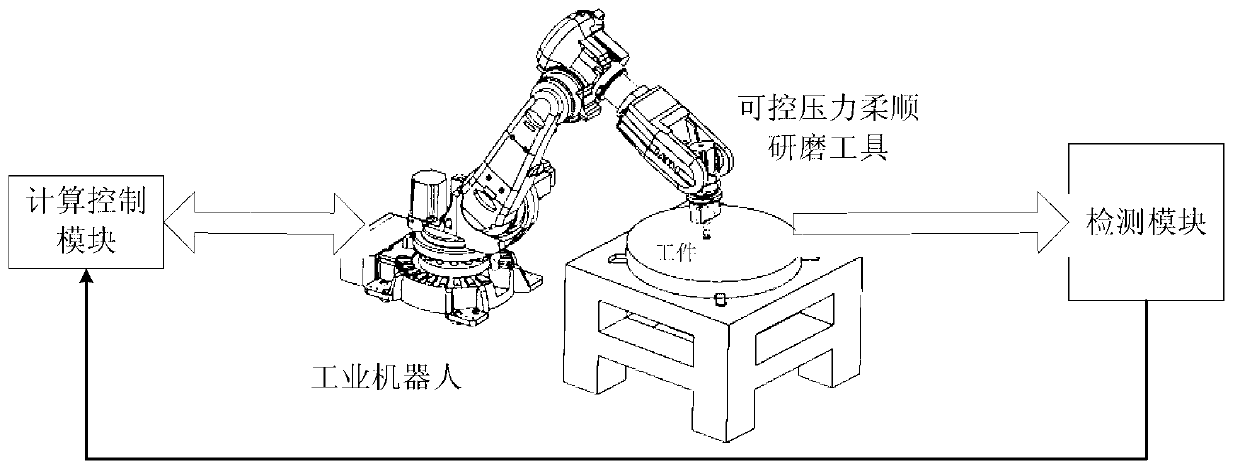
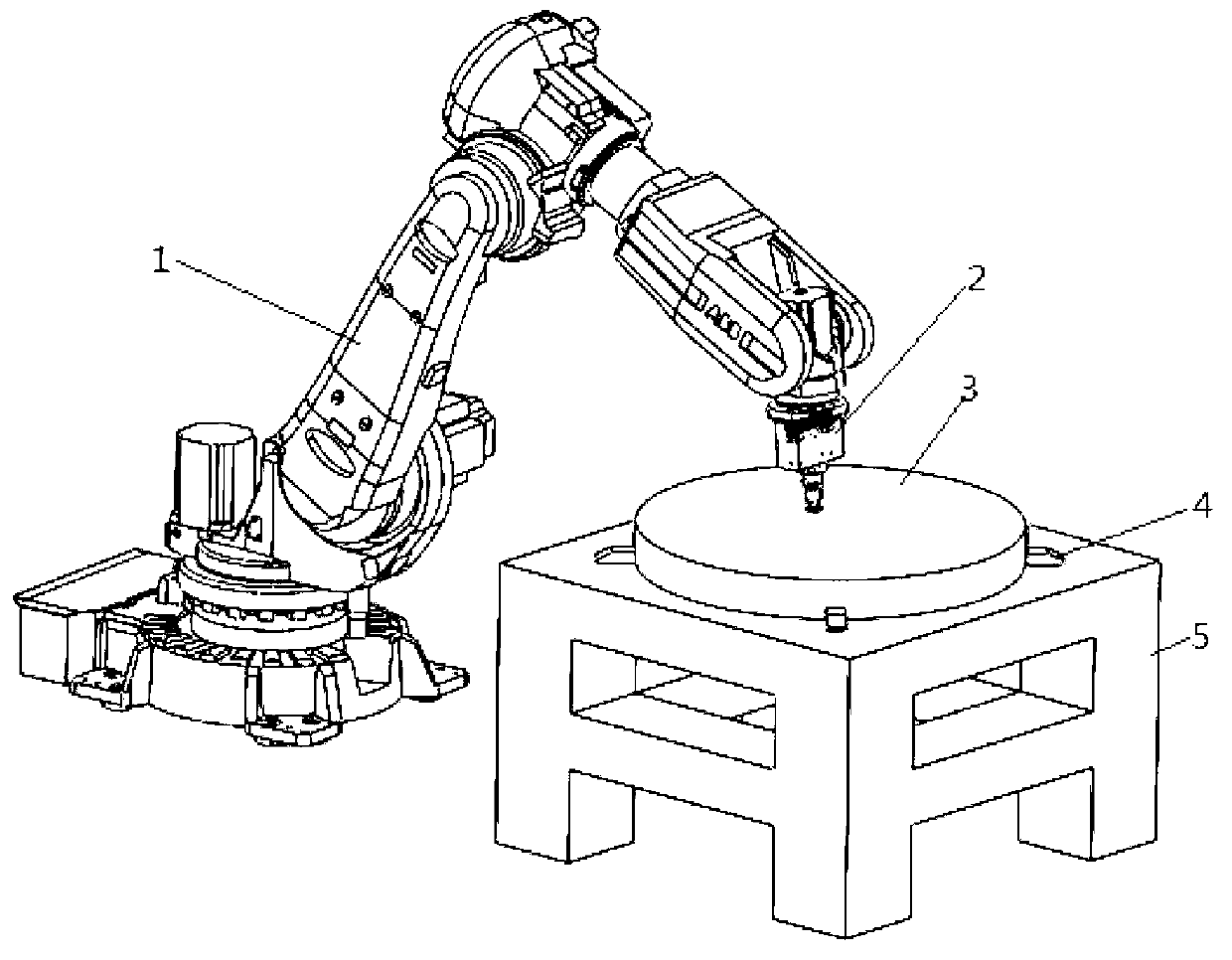
[0028] A specific embodiment of the present invention will be described below with reference to the accompanying drawings. The pressure-controllable, speed-variable active and compliant robot grinding system includes four parts.
[0029](1) Industrial robots, through the 6-axis linkage of the robot, can realize the precise control of the spatial position and angle of the controllable pressure compliant grinding tool, so as to realize the planned grinding trajectory and residence time.
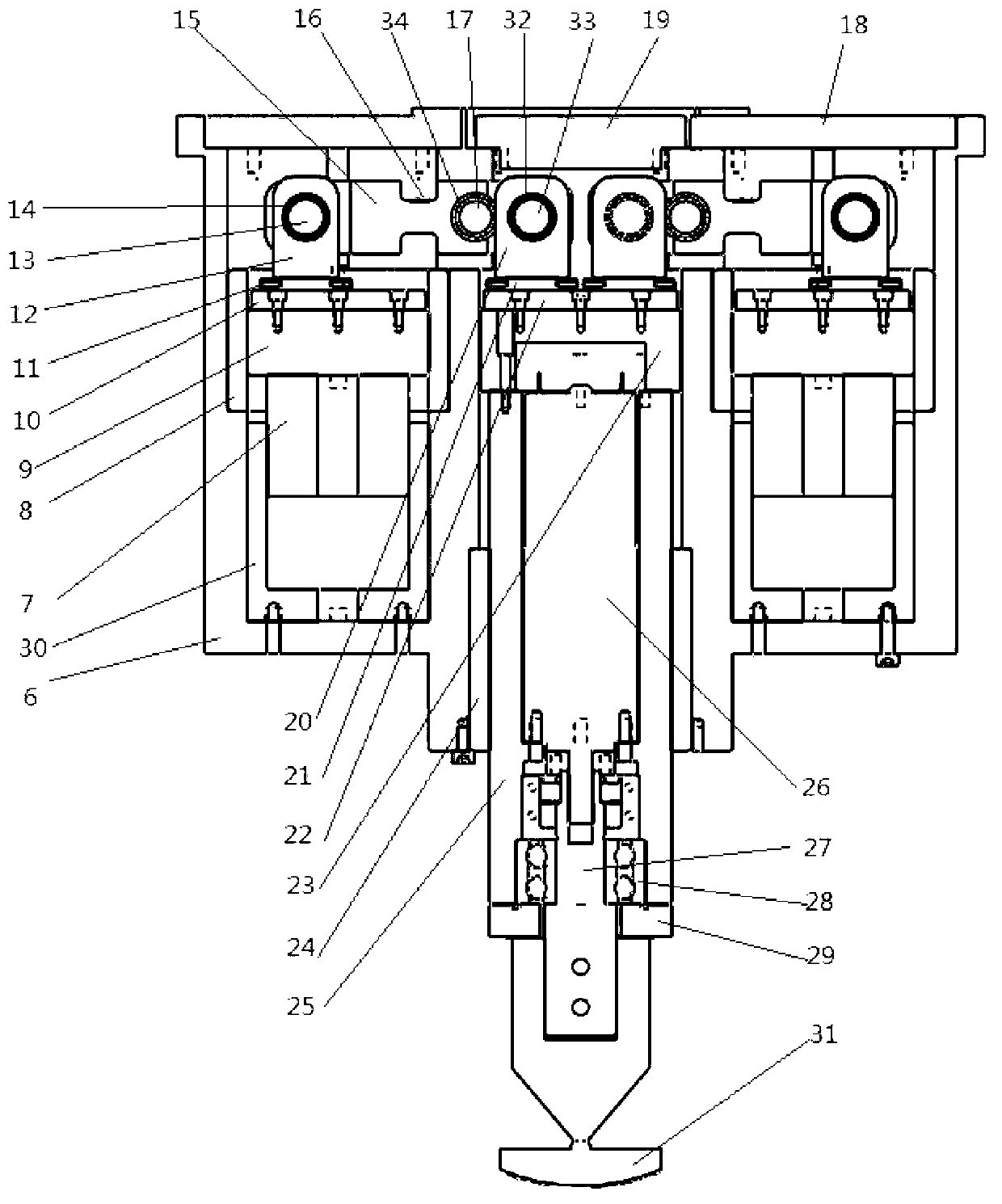
[0030] (2) Controllable pressure compliant grinding tool, the flange of the shell 6 of the tool is connected to the wrist flange of the industrial robot 1, and one or more voice coil motors 30 inside it output controllable force, through the voice coil motor The transmission of the slider 9, the linear guide slider 11 and the side seat 12 is applied to one side of the connecting rod 15, and the other side of the connecting rod 15 connects the amplified force through the side seat 20, the linear ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More