

Parallel type mechanical grabbing arm mechanism
A grabbing manipulator, parallel technology, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of increasing the working load at the end of the manipulator and unfavorable work of the manipulator
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0008] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
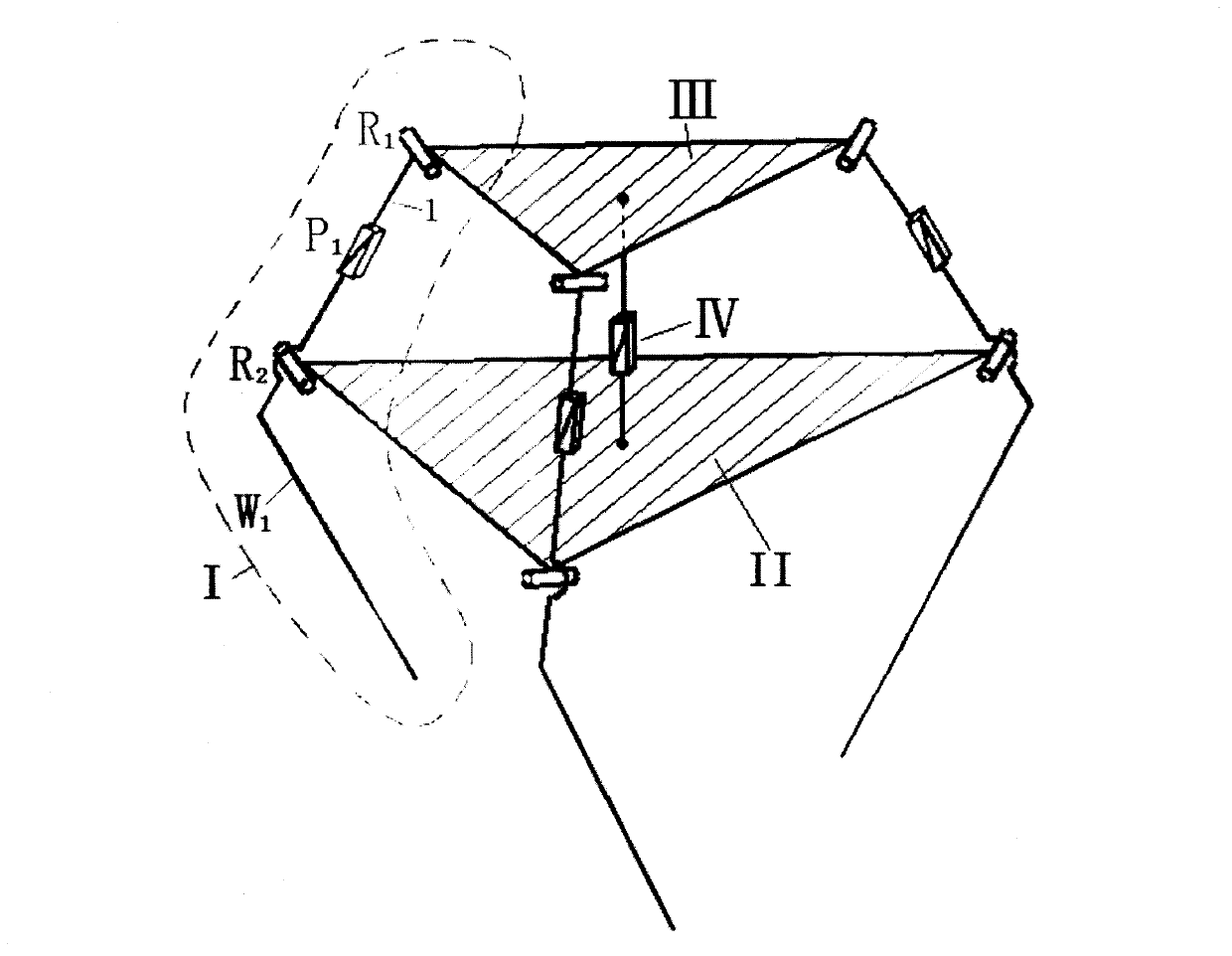
[0009] figure 1 It is the principle diagram of the mechanism of the present invention. The main body of the mechanism is composed of three grasping branch chains with the same structure, a static platform (upper platform), a moving platform (lower platform), and a mobile branch chain connected to the center of the two platforms. The chain is evenly arranged between the two platforms, and the included angle is 120°. The structure is as follows figure 1 shown. In the grasping branch chain I, one end of the rod 1 and the static platform III pass through the rotating pair R 1 connection, the other end is moved through the vice P 1 with working arm W 1 Connected, working arm W 1 With the moving platform II through the rotary joint R 2 connection, revolving pair R 1 and revolving pair R 2 The axes of rotation are parallel to each ot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More