

Helicopter rotor blade motion parameter measuring method based on binocular three-dimensional vision
A technology of binocular stereo vision and helicopter rotor, which is applied in the field of measurement based on binocular stereo vision, can solve problems such as the inability to directly measure the motion parameters of the blade, the inability to measure the torsion angle of the blade, and the inability to measure the torsion of the blade, reaching dangerous The effect of small coefficient, convenient operation and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The method of the present invention requires the collection of checkerboard images in different directions, and the checkerboard plane and the image plane of the camera must have a certain angle, and at the same time, the checkerboard planes in different directions cannot be parallel; two binocular stereo vision systems are required to be installed on the ground , one is aimed at the forward side of the helicopter blade, and the other is aimed at the rear side of the helicopter blade, so that the entire helicopter blade can be observed; the frame rate of the gigabit network camera is required to be greater than 144fps, and the blade is at a high speed In the state of rotation, the blade image is collected every certain angle (such as 15° angle), and the acquisition is repeated 50-100 times at each angle.
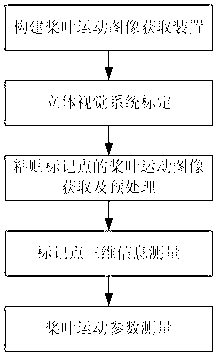
[0014] The present invention adopts such as figure 1 The shown flow chart of the method for measuring the motion parameters of the helicopter rotor blades based on bi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More