

Streetscape image stereoscopic model space orientation method based on direction line segment
A three-dimensional model, space orientation technology, applied in photogrammetry/video surveying, measuring devices, instruments, etc., can solve the problem of low work efficiency, large workload of street view photogrammetry and 3D reconstruction, difficult street view surveying and 3D reconstruction. structure and other problems, to achieve the effect of fast operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0022] A method for spatial orientation of a three-dimensional model of a street view image based on azimuth line segments according to the present invention will be described in detail below in conjunction with specific embodiments:
[0023] Such as Figure 1-2 A method for spatial orientation of a three-dimensional model of a street view image based on a bearing segment is shown, the method comprising the following steps:
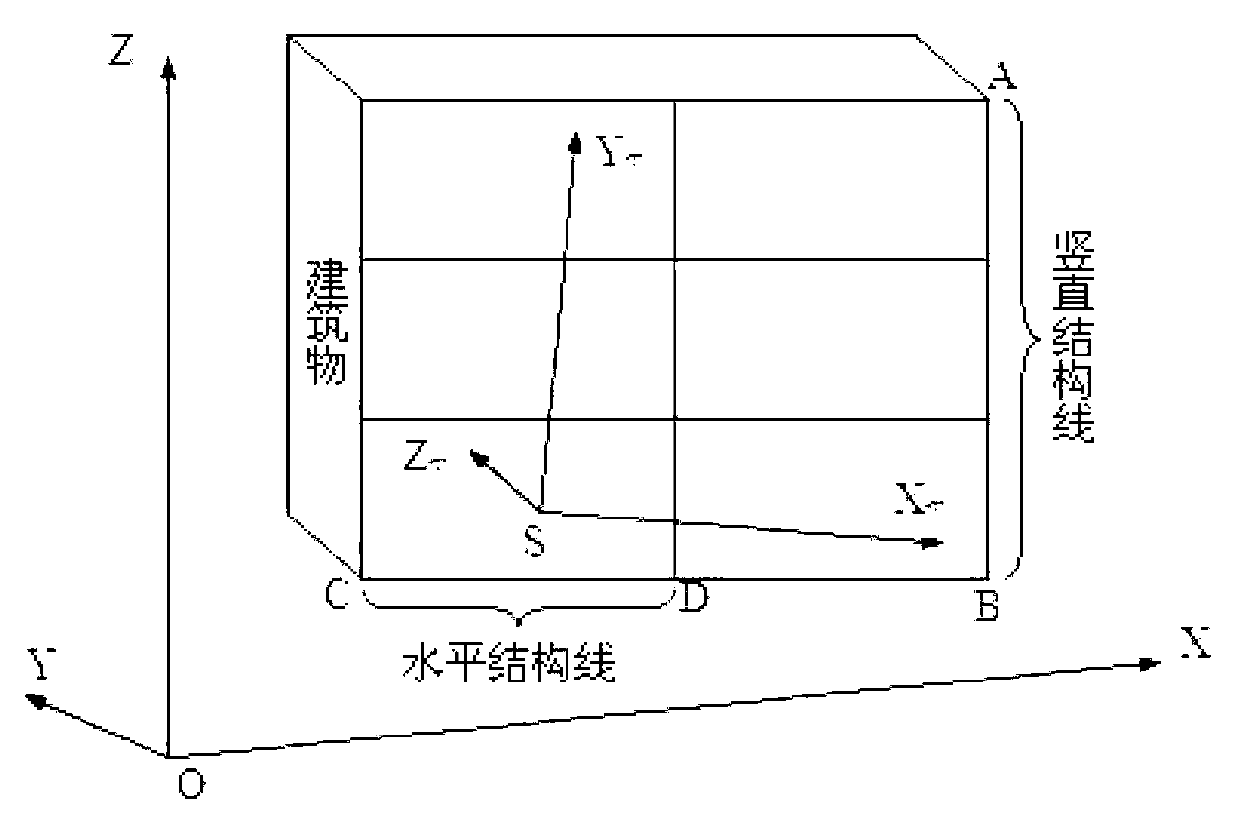
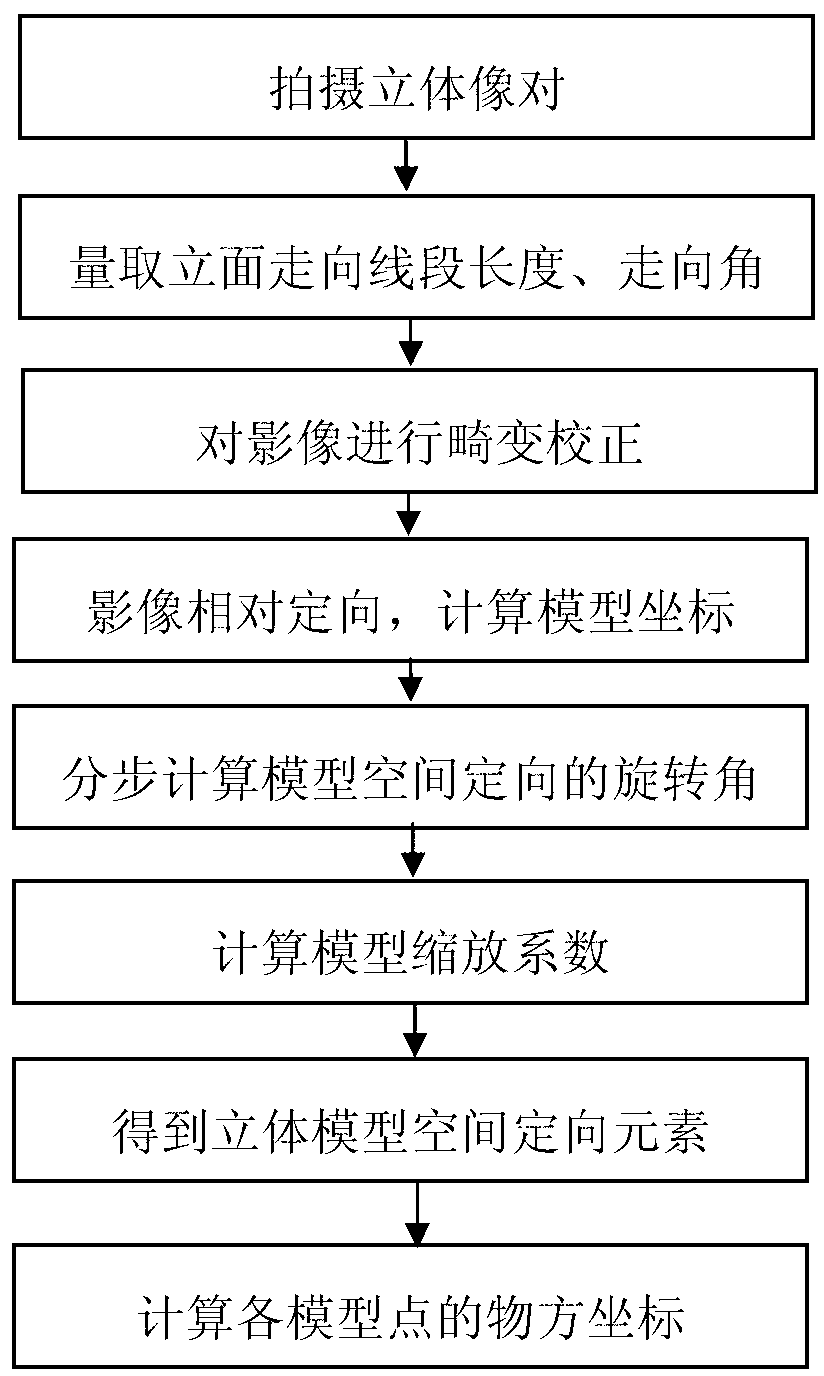
[0024] Step 1. Use a digital camera to collect stereoscopic image pairs of street buildings, and collect information on vertical structural lines and horizontal structural lines on the surface of street buildings to determine the tilt and rotation angle of the image stereoscopic model.
[0025] Step 2, measure the direction angle of the selected facade direction line segment on the building, which is used to determine the azimuth rotation angle of the three-dimensional model, and measure the length of the direction direction line segment of the facade, wh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More