

Distributed multi-robot synergetic location algorithm
A co-location, multi-robot technology, applied in satellite radio beacon positioning systems, instruments, measurement devices, etc., can solve problems affecting algorithm fault tolerance and scalability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The method of the present invention will be described below with the co-location of three robots.
[0050] The three robots R1, R2, and R3 are respectively equipped with code discs to measure their own movement information; robot R1 is equipped with a GPS receiver, which can measure its own position; robot R2 is equipped with a laser radar, which can measure the distance to other robots; The three robots communicate via a wireless network.
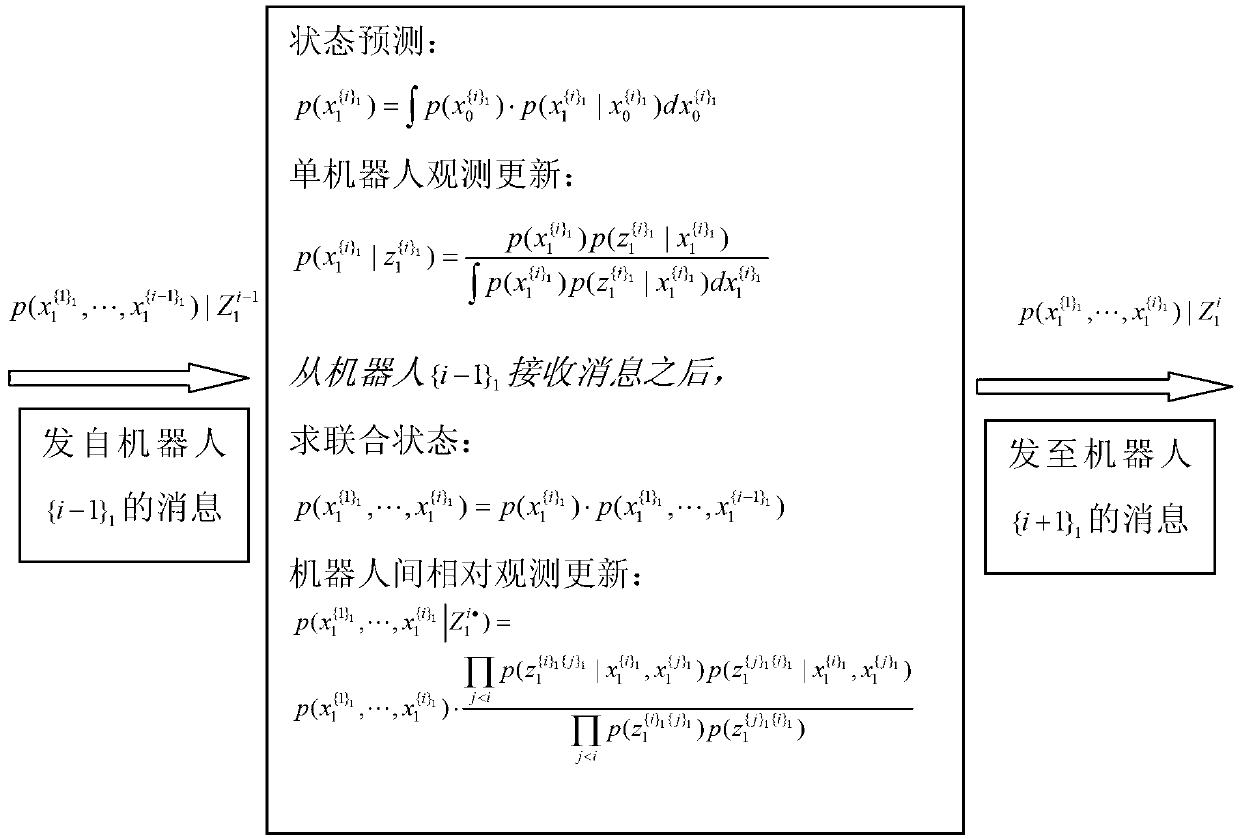
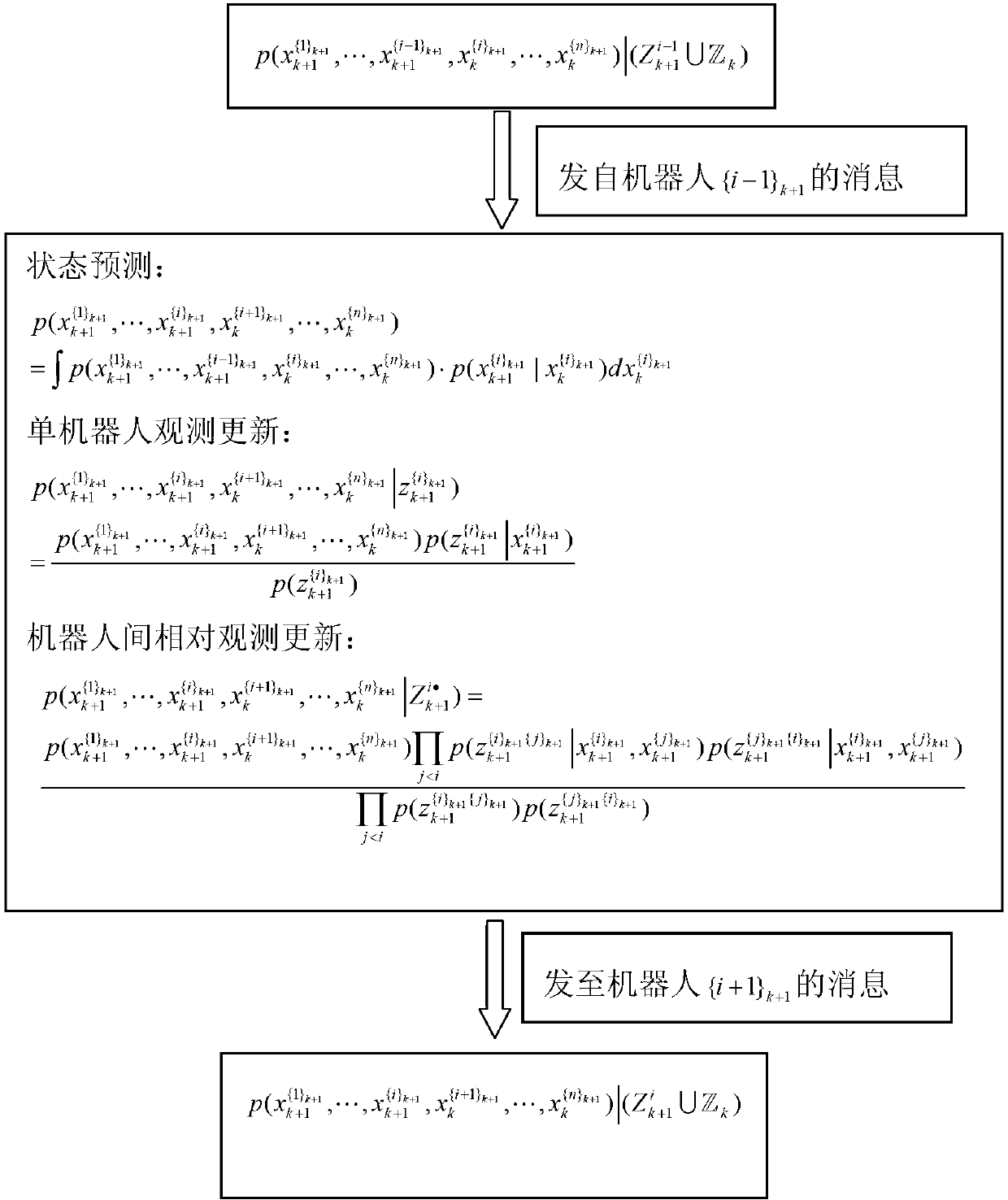
[0051] Formulas (1)-(7) give the general calculation form, and the specific calculation form is related to the probability distribution involved. For Gaussian distribution, the calculation results in formulas (1)-(7) have analytical expressions; for non-Gaussian distributions, the calculation results in formulas (1)-(7) often do not have analytical expressions, and Monte-Carlo simulation can be used method to solve. For non-Gaussian systems, an approximate Gaussian system model can be established by means of linearization and Gaus...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More