

INS (inertial navigation system)-assisted wireless indoor mobile robot positioning method
A mobile robot and wireless positioning technology, applied in positioning, radio wave measurement systems, instruments, etc., can solve the problem of decreased navigation accuracy and achieve the effect of suppressing disturbances
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described in detail below with reference to the accompanying drawings.
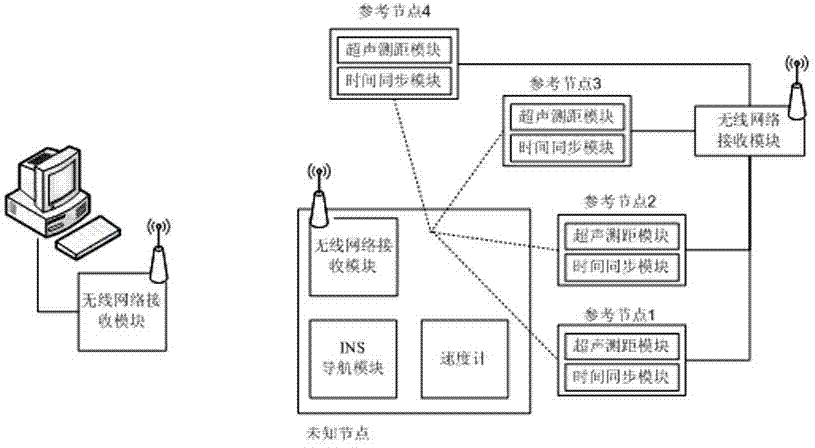
[0024] like figure 1 As shown, a system for an INS-assisted wireless positioning method for an indoor mobile robot includes a reference (RN) node part, an unknown (BN) node part, and a PC part. The reference node part consists of a reference node wireless network receiving module, an ultrasonic ranging module and a time synchronization module (four ultrasonic ranging modules share a set of wireless network receiving modules); the unknown node part consists of an unknown node wireless network receiving module, an INS navigation module and speedometer; PC part consists of desktop computer and wireless network receiving module.
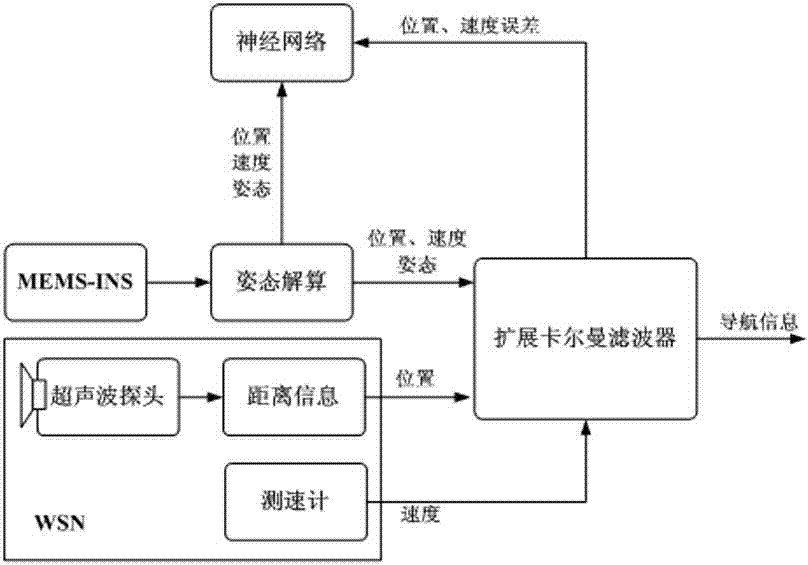
[0025] like figure 2 shown, data fusion using extended Kalman filter in an INS-aided wireless localization method for indoor mobile robots. The system equation of the extended Kalman filter takes the position and velocity of the INS i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More