

Point cloud registration algorithm based on topological characteristic
A technology for topological features and point cloud registration, applied in the field of computer vision, can solve the problems of wrong corresponding points and high calculation cost, and achieve the effect of removing wrong corresponding points, improving robustness and reducing registration elements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
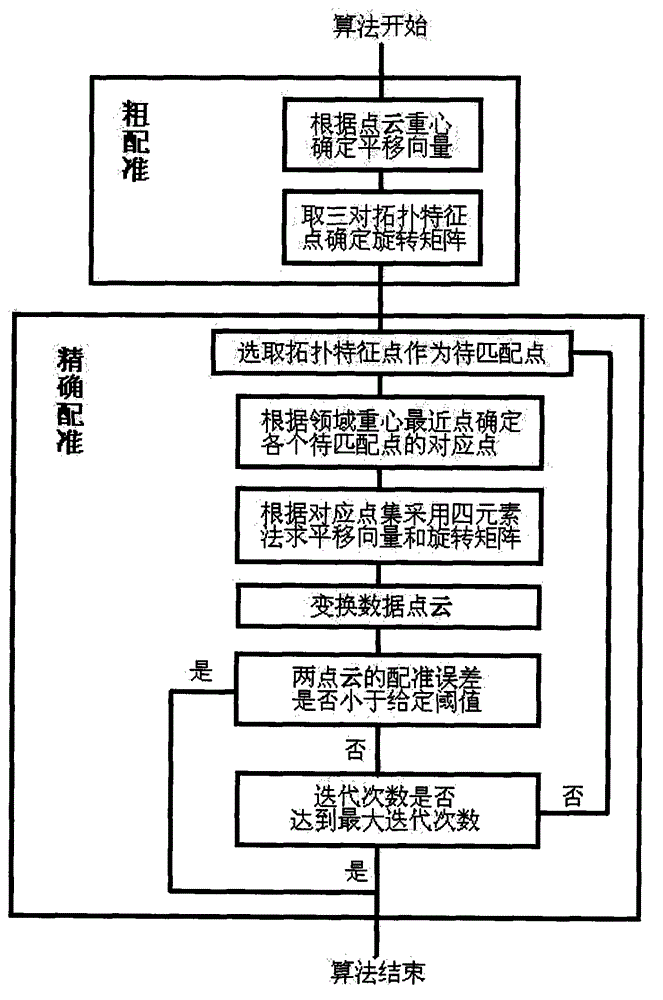
[0017] 1. Coarse registration: This algorithm uses a point cloud coarse registration algorithm based on topological features to calculate the translation vector and rotation matrix respectively.
[0018] 1.1 Calculation of translation vector:
[0019] The center of gravity of each point cloud is calculated separately, and the center of gravity of each point cloud is superimposed to obtain a translation vector for rough registration.
[0020] 1.2 Rotation matrix calculation:
[0021] First, use the chord method to obtain the three topological points of each point cloud. The specific method is: traverse all points of the point cloud to obtain the two farthest points P 1 ,, P n Traverse the remaining points to get the distance from P 1 ,P n The farthest point on the line P m . Then, the corresponding relationship between the three topological points of each point cloud is determined by the distance between the three points, and three pairs of feature points are obtained. F...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More