

Single stand column plane coordinate mechanical arm of box filler
A technology of plane coordinates and robotic arms, which is applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve the problems of cumbersome installation and adjustment, complex structure of robotic arms, and high production costs, so as to save time for replacement and installation and improve production efficiency , Simple structure and reliable effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The present invention will be described in further detail below in conjunction with the accompanying drawings and the best embodiments.
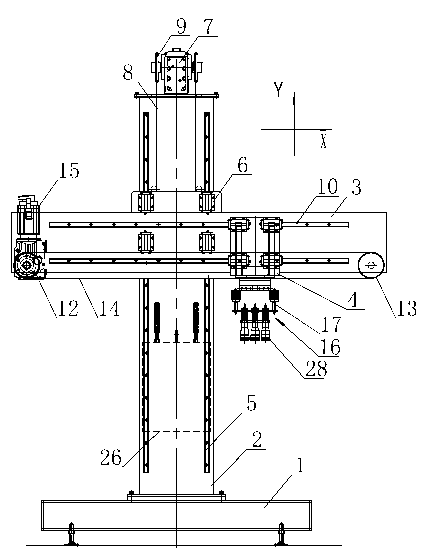
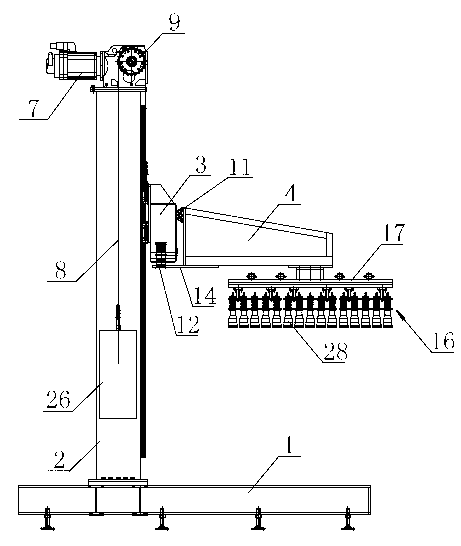
[0014] like figure 1 , figure 2 , image 3 As shown, the single column plane coordinate mechanical arm on the case packing machine includes a base 1, a support column 2 is fixedly installed on the base 1, a horizontal beam 3 is arranged on the support column 2, and a bottle grasping robot arm 4 is arranged on the horizontal beam 3. The support column 2, the horizontal beam 3, and the bottle-grabbing mechanical arm 4 are perpendicular to each other in pairs, wherein the connection structure between the support column 2 and the horizontal beam 3 includes: the support column 2 is provided with a lifting guide rail 5, and the horizontal beam 3 is provided with a The lifting slider 6 used in conjunction with the lifting guide rail 5 is provided with a lifting drive device on the supporting column 2. The structure of the lifting driving ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More