

Man-machine cooperation device and method based on Kinect video camera
A technology of human-machine collaboration and camera, applied in the field of image processing and target tracking, can solve unfavorable tasks, separation of end effector motion and joint motion, unable to solve CP and other problems, and achieve the effect of poor noise immunity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] Below in conjunction with accompanying drawing a kind of based on that the present invention relates to A preferred embodiment of the camera human-machine collaboration device and method is described in detail, but the present invention is not limited to this embodiment. In order to enable the public to have a thorough understanding of the present invention, specific details are described in detail in the following preferred embodiments of the present invention.
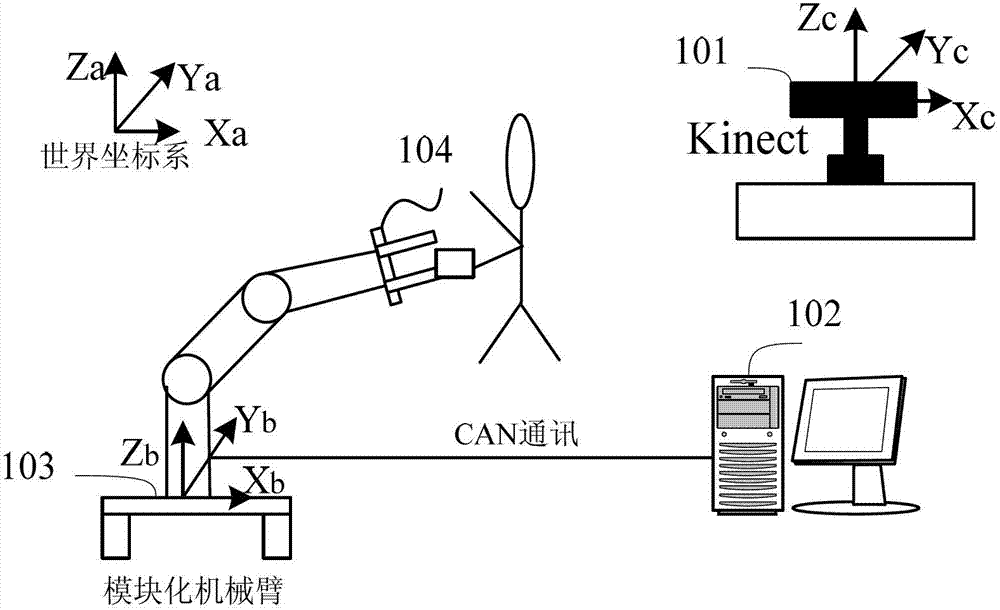
[0027] figure 1 A schematic diagram of a human-machine collaboration device.
[0028] Such as figure 1 As shown, the human-computer cooperation device involved in the present invention includes A camera 101 , a computer 102 , a modular robotic arm 103 , and a robotic arm 104 . in the The camera coordinate system is established as the center point, and the reference coordinate system is established with the center of the base at the bottom of the manipulator as the center point. The computer plans the a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More