

System and method for controlling exoskeleton robot
An exoskeleton robot and control system technology, applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., can solve problems such as the implementation method not mentioned, and achieve the effect of simplifying the development process, simplifying the implementation, and reducing the degree of coupling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and examples. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
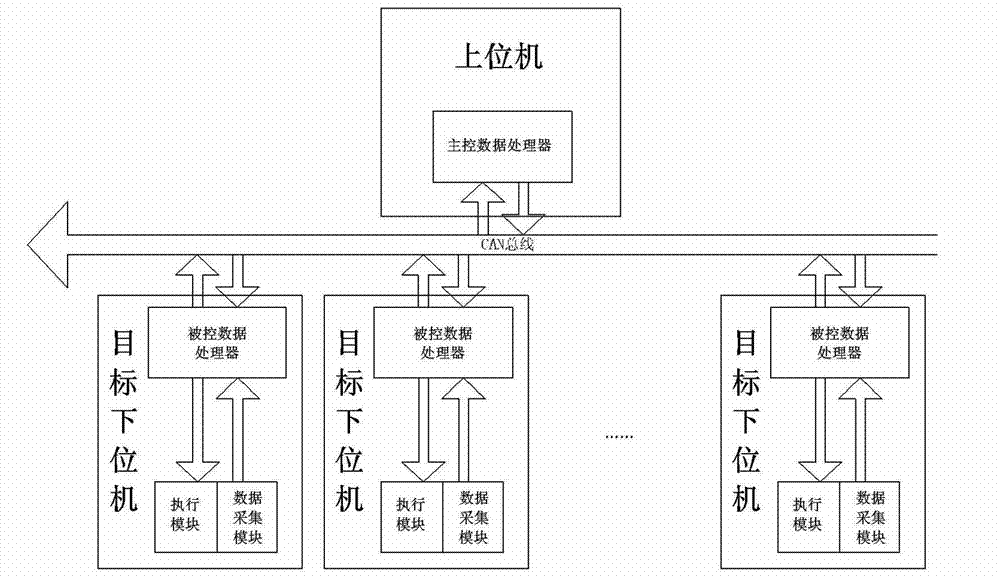
[0041] The present invention is applied to the robot control system, and its system structure is as follows: figure 1 shown.
[0042] The system includes an upper computer and at least one target lower computer, wherein the upper computer includes a master data processor for establishing and editing data tables of the upper computer; the target lower computer includes a controlled data processor for data processing of the target lower computer. Table creation and editing; data acquisition module, used to collect the status data updated by the target lower computer; execution module, used to control the exoskeleton robot.
[0043] Wherein, the controlled data processor is re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More