

Amphibious robot capable of flying and climbing wall and control method of amphibious robot
A robot and wall-climbing technology, applied in the field of robots, can solve the problems of slow moving speed and difficulty in crossing obstacles, and achieve the effect of meeting the task requirements, sustainable working time for a long time, and compact structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
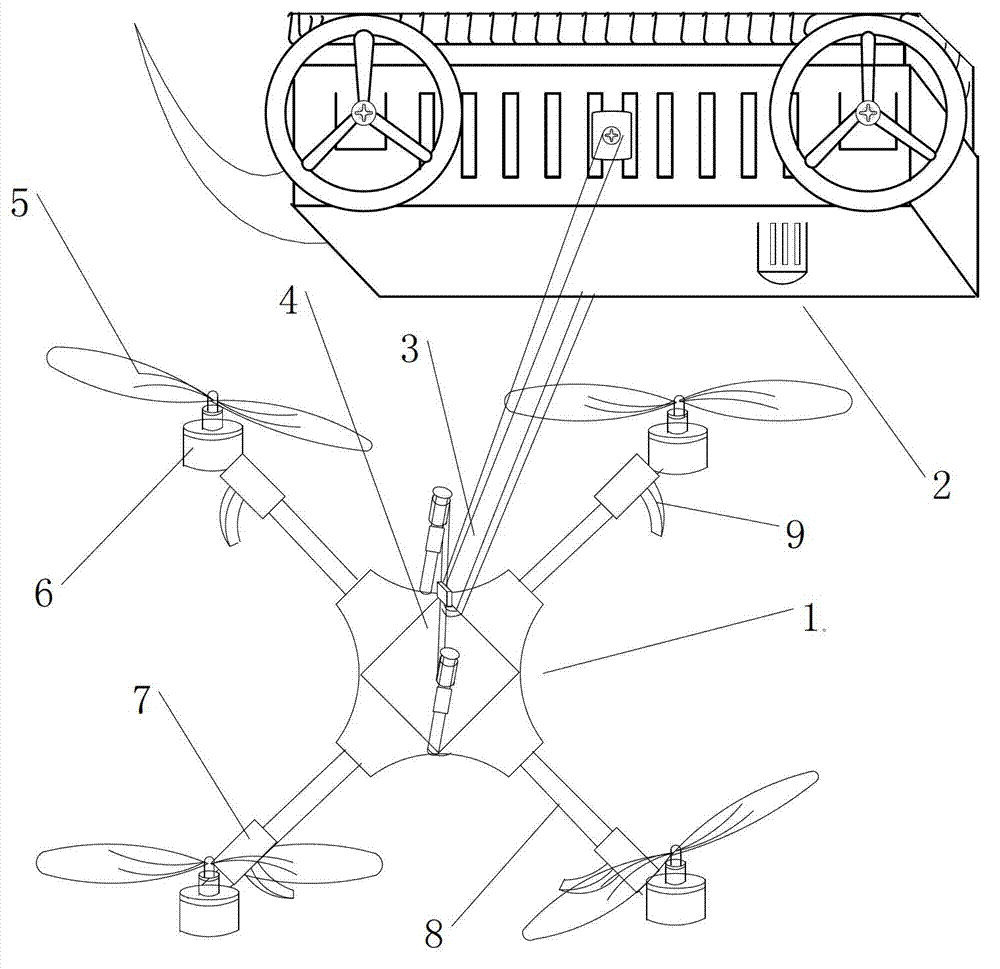
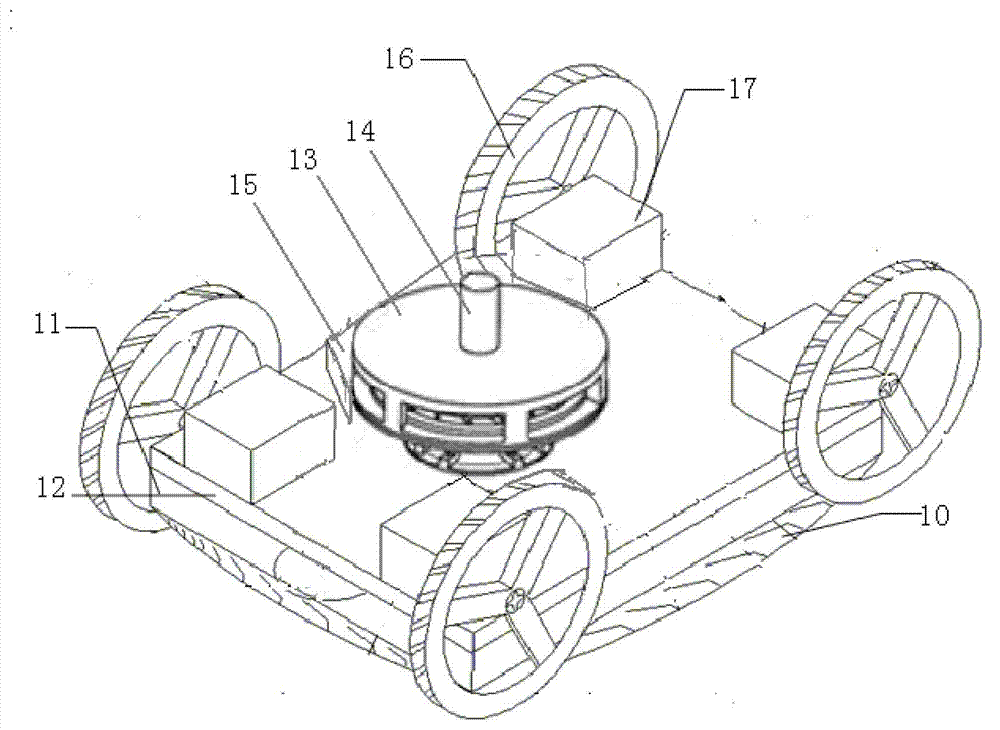
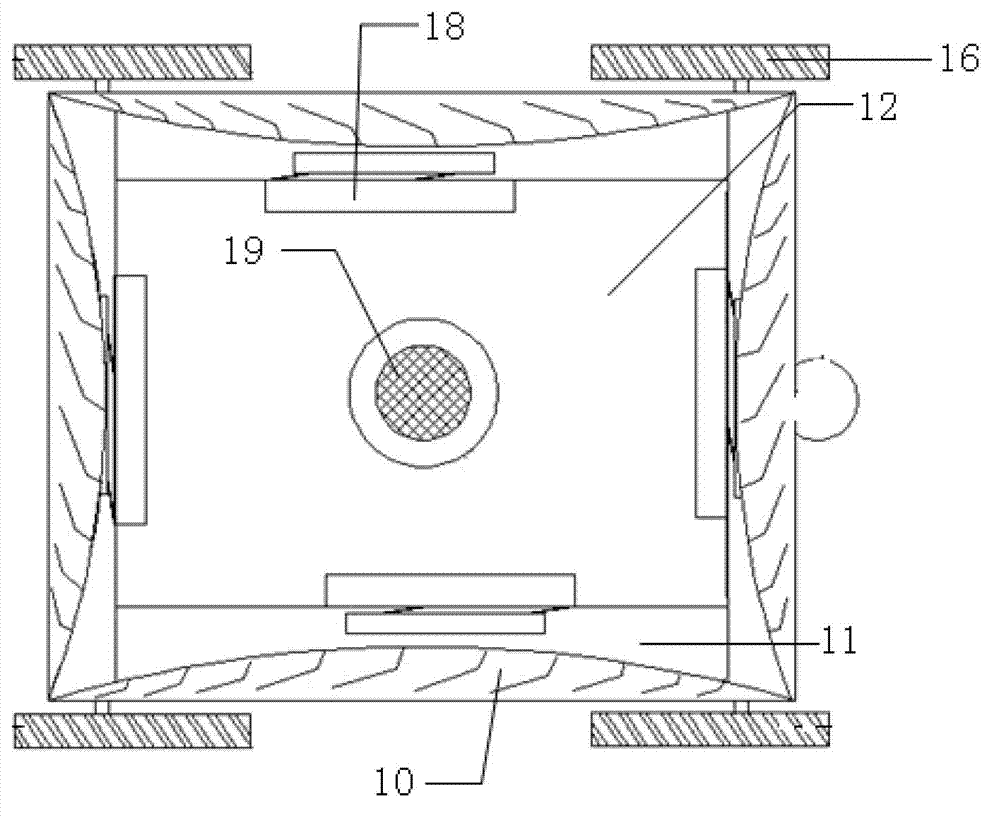
[0024] combine figure 1 , the flying and wall-climbing amphibious robot of the present invention includes a flight subsystem 1, a wall-climbing subsystem 2, a connecting mechanism 3 and an on-board control system 4, and the flying subsystem 1 and the wall-climbing subsystem 2 pass through the connecting mechanism 3 at a rate of 0-90 The angle of ° is fixed (with horizontal side suction and vertical top suction), and the connection methods are mainly as follows: (1) Mainly used for adsorption and movement on horizontal walls such as ceilings; (2) Mainly used for adsorption on vertical walls and move; (3) for all-round adsorption and movement. The on-board control system 4 is installed on the flight subsystem 1 or the wall-climbing subsystem 2, and the on-board control system 4 makes the robot have three states of flying, wall-climbing and perching by controlling the flight subsystem 1 and the wall-climbing subsystem 2; Unit 4 controls the robot to work separately in three stat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More