

Robot motion track locating method and robot motion track locating device
A robot motion, robot technology, applied in two-dimensional position/channel control and other directions, can solve problems such as sudden change in speed and reduction in system accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
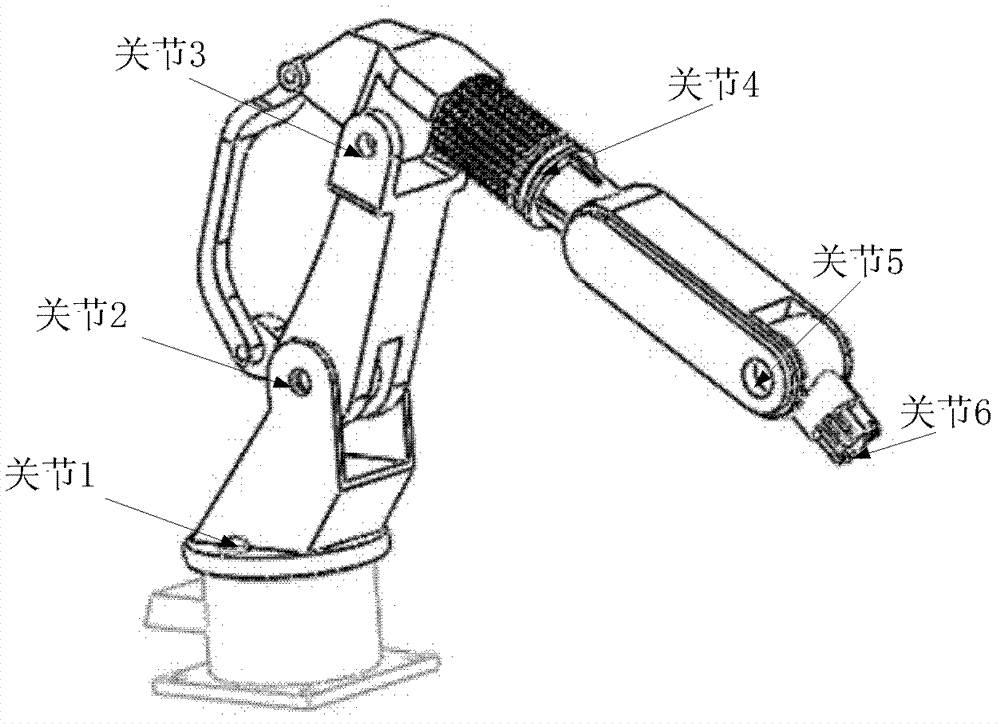
[0028] see figure 1 , the present invention is mainly aimed at industrial robots that require high positioning accuracy such as spot welding and arc welding. The schematic diagram of its mechanism is as follows figure 1 Shown: A 6-axis industrial robot, with a total of 6 joints, joint 1 to joint 6, each joint rotates around a fixed coordinate axis, and the current position is displayed through the joint value. The present invention adopts S-shaped curve acceleration and deceleration as rough interpolation calculation. In order to ensure the smooth operation of the motor and the high-precision positioning of the robot, on the basis of the S-shaped curve acceleration and deceleration as the rough interpolation calculation, the discrete points on ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More