

Command filtering backstepping control method based on interference observer
A technology of disturbance observer and backstepping control, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of poor control effect and inability to guarantee the stability of closed-loop system.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
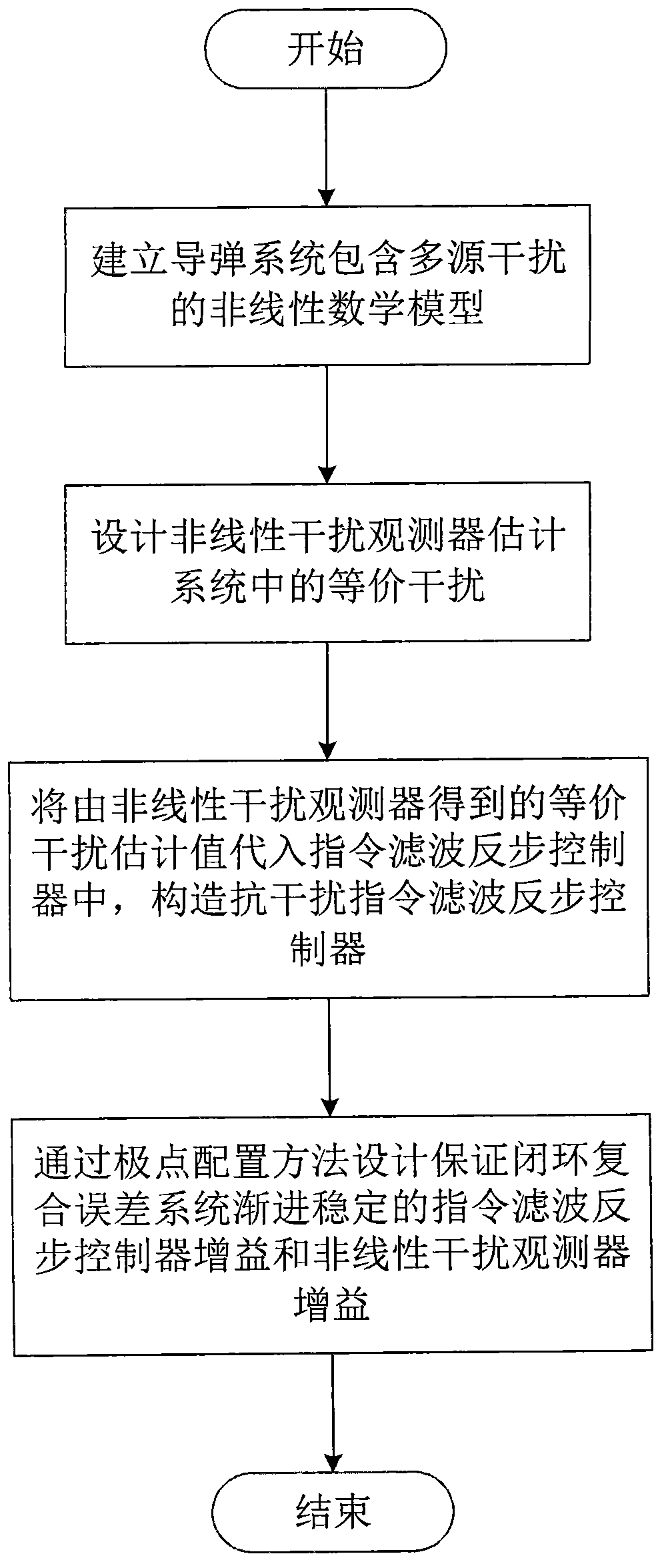
[0042] The present invention will be further described in detail below by taking the longitudinal maneuver control of missiles as an example. The specific implementation steps of this embodiment are as follows figure 1 As shown, the detailed implementation steps are as follows:
[0043] Step 1: Establish a nonlinear mathematical model of the missile system including multi-source interference
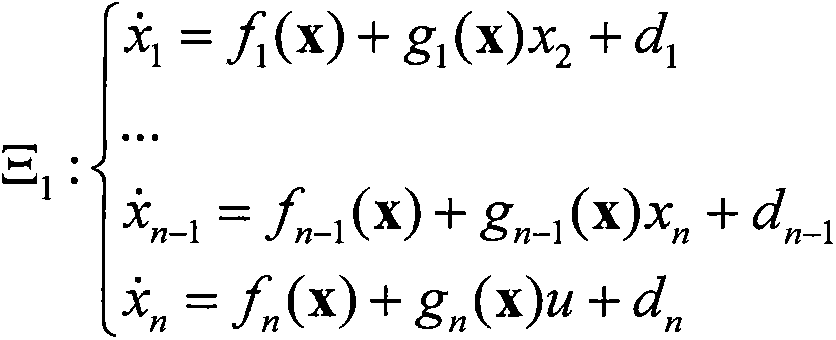
[0044] According to the two different design requirements of command filter backstepping recursive design and disturbance observer overall design, the nonlinear dynamic equation of missile pitch plane short-period mode is expressed as two different mathematical description forms:
[0045] The first is the description form of the second-order subsystem, as shown in the following formula:
[0046] Θ 1 : x . 1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More