

Conveying robot
A technology for handling robots and workpieces, applied in the field of handling robots, to achieve the effect of reducing adverse effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 approach )
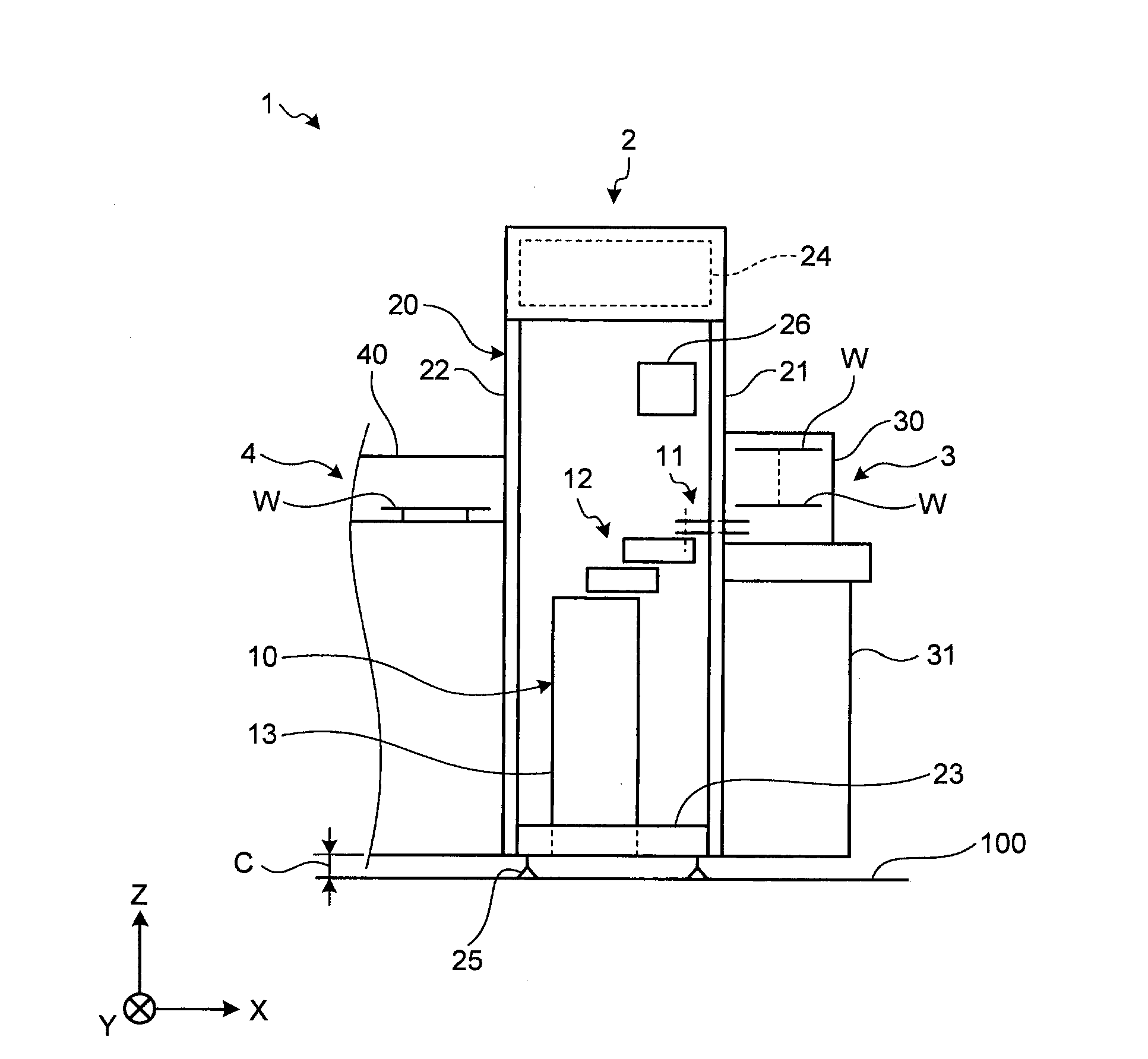
[0024] First, refer to figure 1 The overall configuration of the transport system according to the first embodiment will be explained. figure 1 It is a schematic diagram showing the overall configuration of the conveying system 1 according to the first embodiment.
[0025] For ease of understanding, in figure 1 , A three-dimensional Cartesian coordinate system is shown, the three-dimensional Cartesian coordinate system including a Z axis in which the positive direction is vertically upward and the negative direction is vertically downward (ie, the "vertical direction"). Therefore, the direction along the XY plane means "horizontal direction". In some cases, the Cartesian coordinate system is shown in other drawings used in the following description. In addition, in the following, for a component including a plurality of elements, only one of the elements is denoted with a reference numeral, and the reference numerals of other elements are omitted in some cases.
[0026] Such as fi...
no. 2 approach )
[0092] Next, the transfer robot 10c according to the second embodiment will be explained. Picture 9 with Picture 10 It is a schematic plan view of the transfer robot 10c according to the second embodiment. Such as Picture 9 As shown, the transport robot 10c includes a trunk part 5, and a left arm unit 5a and a right arm unit 5b extending from the trunk part 5.
[0093] The trunk part 5 is a basic unit of a transport robot 10c fixed to the floor or the like, and is formed so that the top surface on the positive side of the Y axis (hereinafter referred to as "right side") is in the Z axis direction than the negative direction of the Y axis The top surface of the side (hereinafter referred to as "left side") is higher.
[0094] The left arm unit 5a includes a first arm 51a and a second arm 52a. The first arm 51a has the base end side provided on the top surface of the left side of the trunk portion 5 so as to be rotatable about an axis z1 that is a rotation axis parallel to the Z...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More