

Inside and outside reinforced structural type configuration-changeable obstacle crossing robot
A technology for strengthening structures and robots, applied in the field of robots, can solve problems such as low movement speed, poor ability to cross trenches, steps, complex structures, etc., and achieve the effect of improving stability and enhancing stability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention is described in more detail below in conjunction with accompanying drawing example:
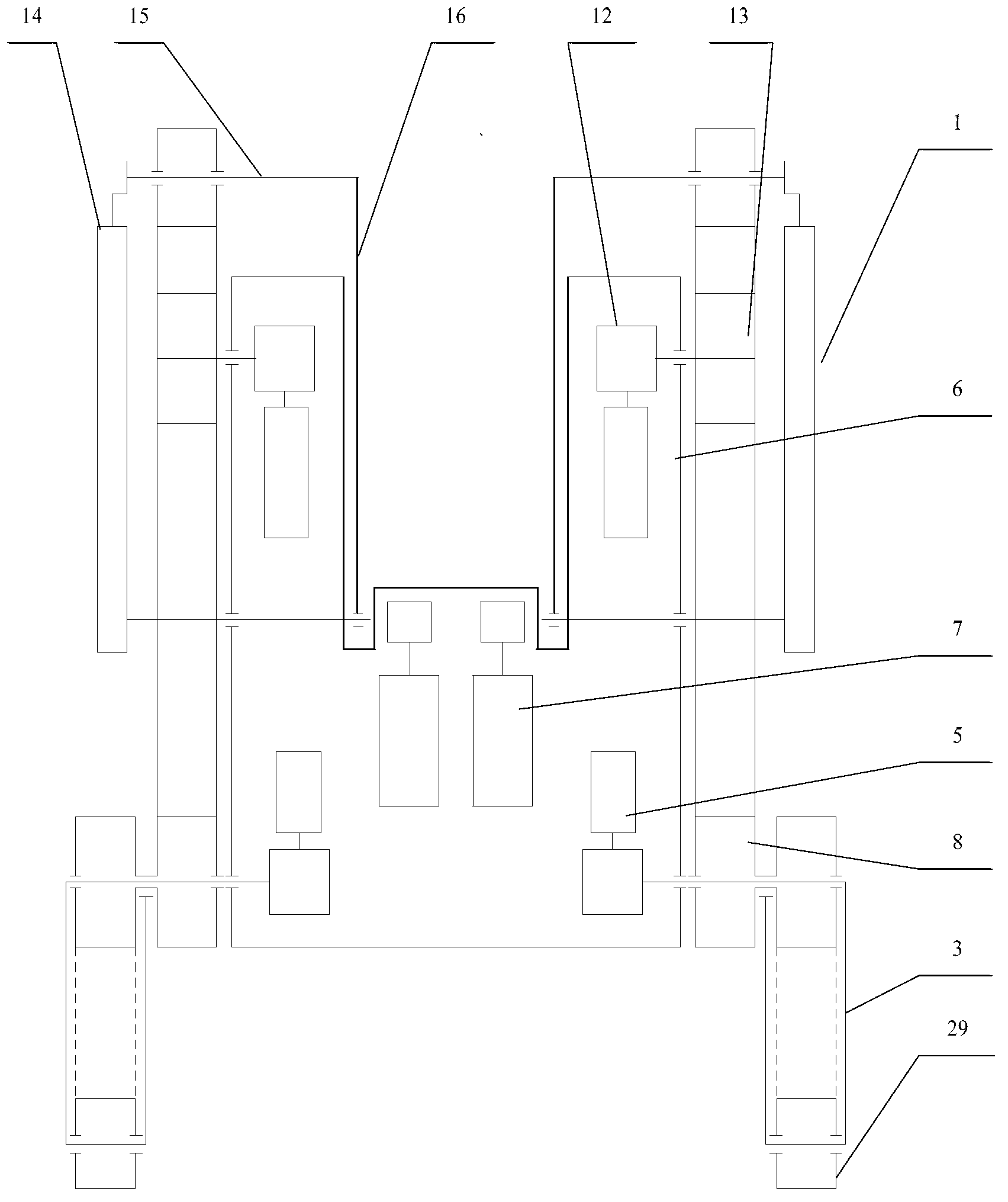
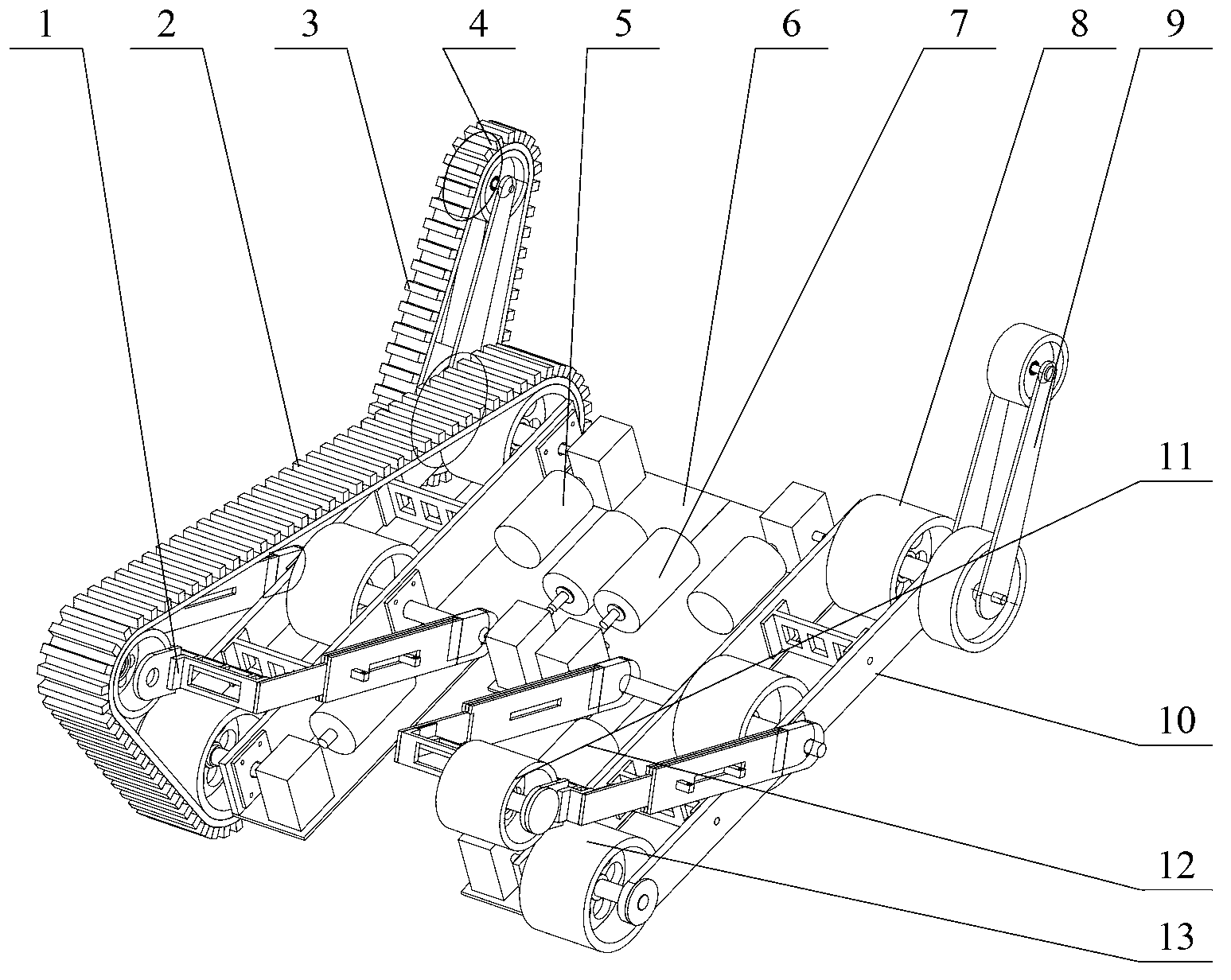
[0026] combine Figure 1-12 , the parts included in the present invention: the robot is composed of a car body 6, a main arm drive motor 7, a drive motor 12, an auxiliary arm drive motor 5, a power drive wheel 13, a driven wheel 8, a planetary wheel 11, a crawler belt 2, and a crawler support frame 10 , Auxiliary arm crawler 4, auxiliary arm crawler support frame 9, and the entire main arm 1, auxiliary arm 3 drive parts and so on. The power driving wheel 13 is distributed on both sides of the front end of the car body 6 , the main arm 1 is located on the left and right sides of the power driving wheel 13 , and the auxiliary arm 3 is located on the left and right sides of the driven wheel 8 .
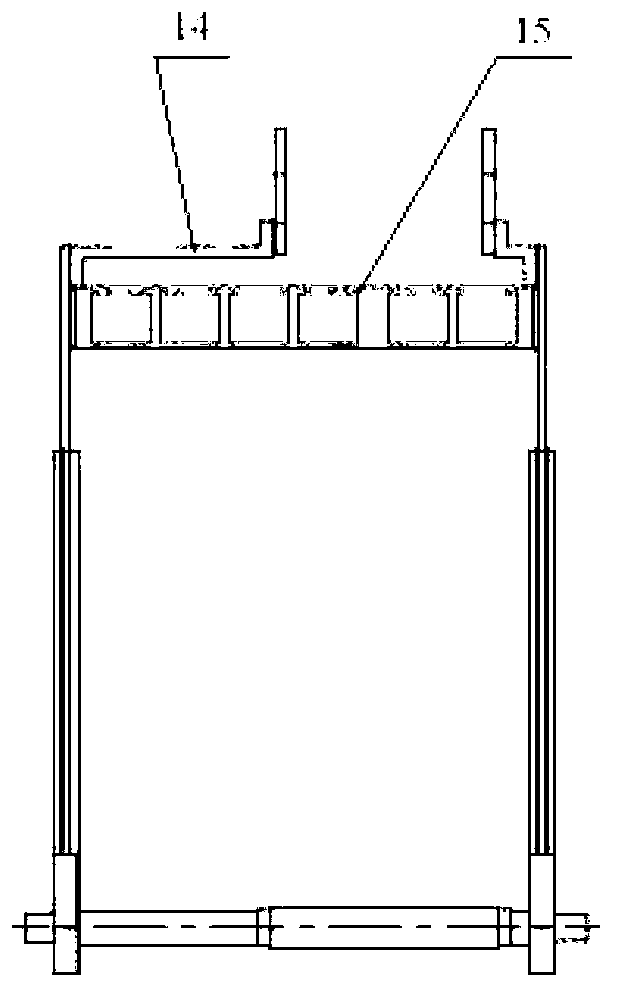
[0027] Main arm 1 is divided into inner arm 16 and outer arm 14, see Fig. 3, is connected by a support plate 15 between inner and outer arm, inner and outer arm all compris...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More