

Man-machine interactive control system and method for manipulator
A control system and manipulator technology, applied in manipulators, manufacturing tools, etc., can solve the problems of shifting, lengthy, inconvenient, etc., and achieve the effect of reducing control tension, enhancing participation, and being easy to describe and realize.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The implementation of the present invention will be further described below according to the accompanying drawings.
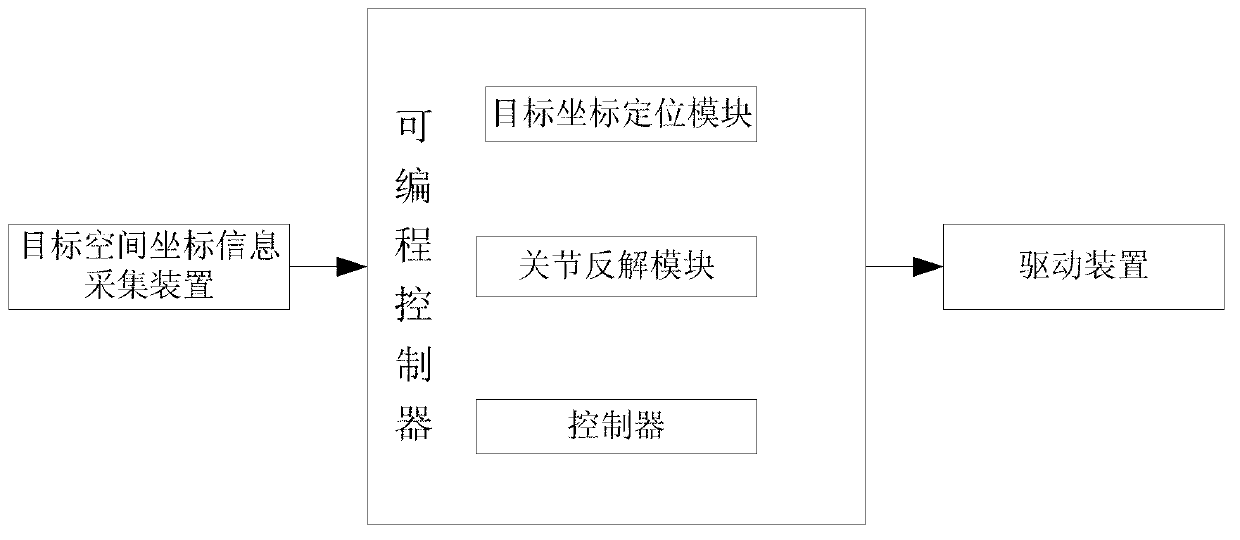
[0042] Manipulator control system of the present invention, as figure 1 As shown: It includes three parts, namely: target space coordinate information acquisition device, programmable controller and drive device, of which:
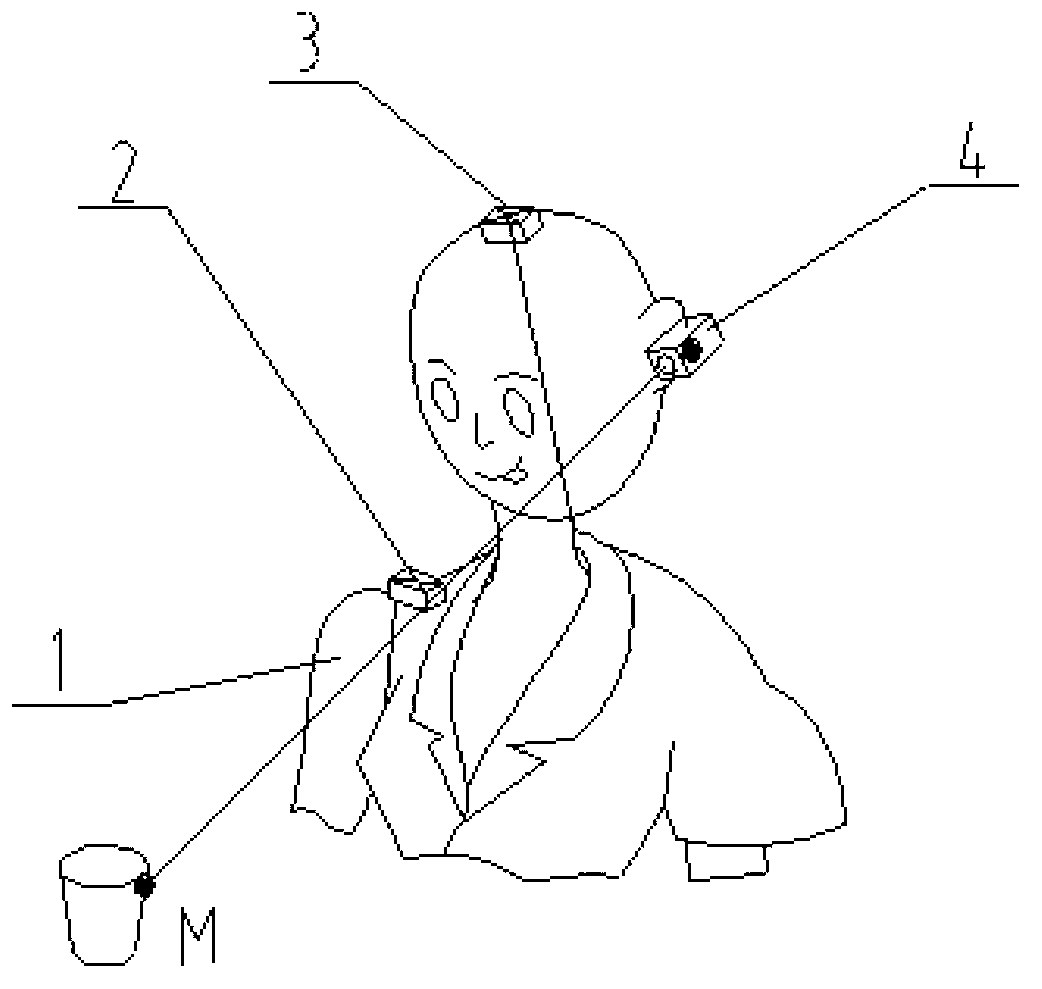
[0043] The structure of the target space coordinate information collection device is as follows: figure 2 Shown: the head of the person is used as the gimbal 1, and a three-dimensional attitude sensor is installed on the head, which is called the head three-dimensional attitude sensor 2, which can move with the head and is used as the attitude of the gimbal 1 active coordinate system. Detection; another three-dimensional attitude sensor installed on the shoulder of the person (equivalent to the base of the gimbal 1) is called the shoulder three-dimensional attitude sensor 3, which is used as a static basic coordinate system. By com...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More