

Man-machine interactive manipulator control system and method based on binocular vision
A binocular vision and control system technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of inability to accurately detect the position and attitude of working objects, not in place, inconvenient, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The implementation of the present invention will be further described below according to the accompanying drawings.
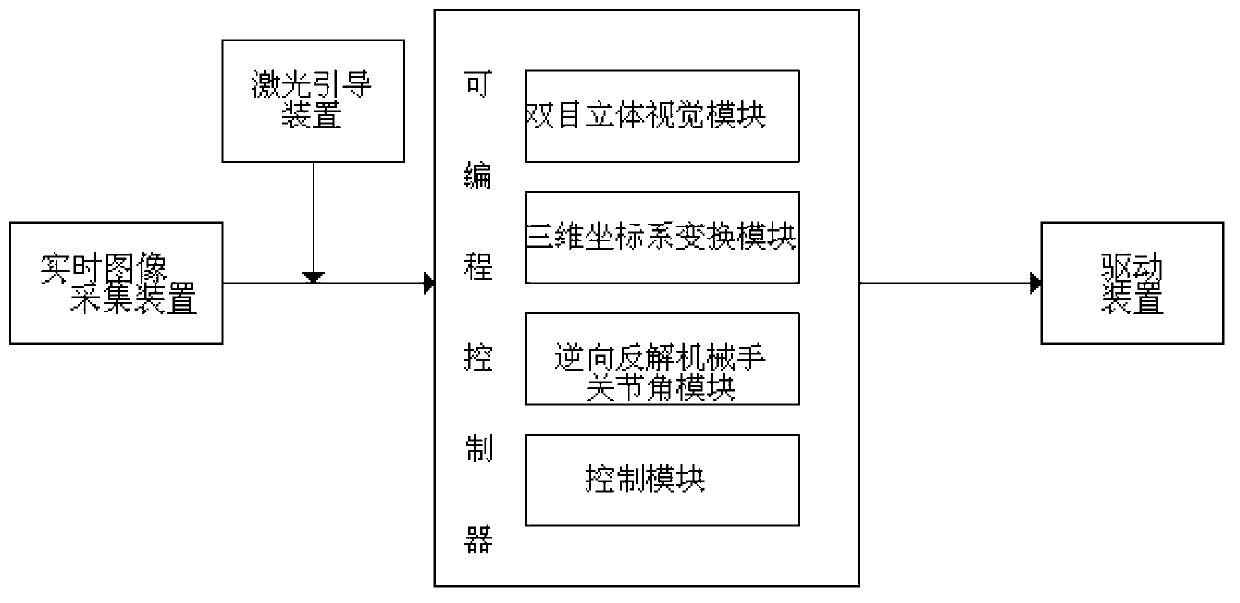
[0041] figure 1 It is a schematic block diagram of the system of the present invention. It can be seen from the figure that it includes four major parts, namely: a real-time image acquisition device, a laser guidance device, a binocular stereo vision module, a three-dimensional coordinate system transformation module, and a reverse anti-analysis manipulator joint angle module. A programmable controller composed of a control module and a drive module. in:
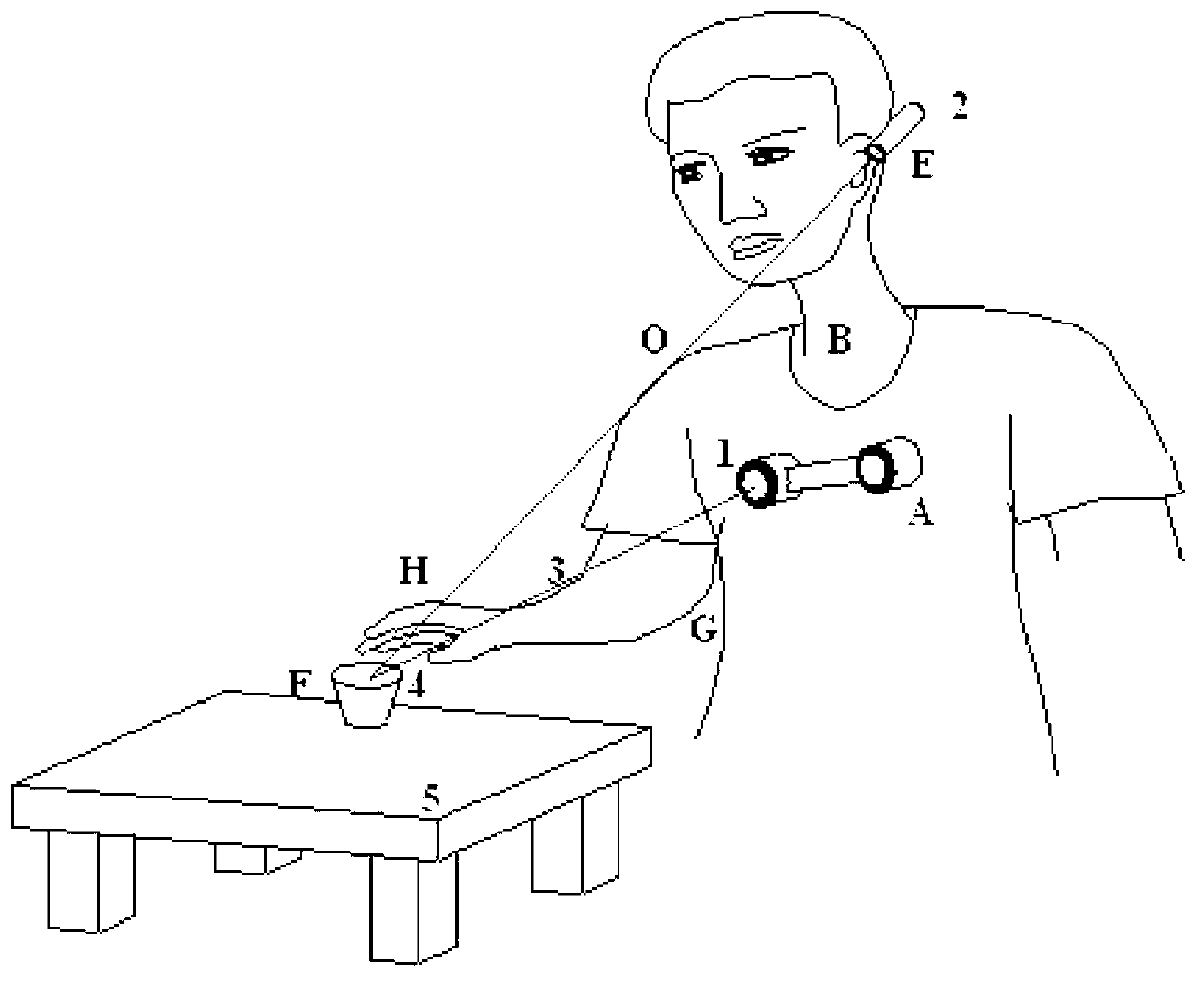
[0042] The embodiment of the real-time image acquisition module is for example figure 2 As shown, it is a binocular camera 1 placed at point A on the chest of a patient with a disabled limb. The first function is to provide real-time video streams for man-machine interactive control of the manipulator operation, so that the manipulator controller can obtain the visual field information in front of h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More