Measurement apparatus and measurement apparatus for attitude of self-walking underground tunneling robot
A measuring device and robot technology, which is applied in the direction of measuring device, measuring angle, using optical device, etc., can solve the problems of increasing positioning error and not suitable for long-distance and long-term measurement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
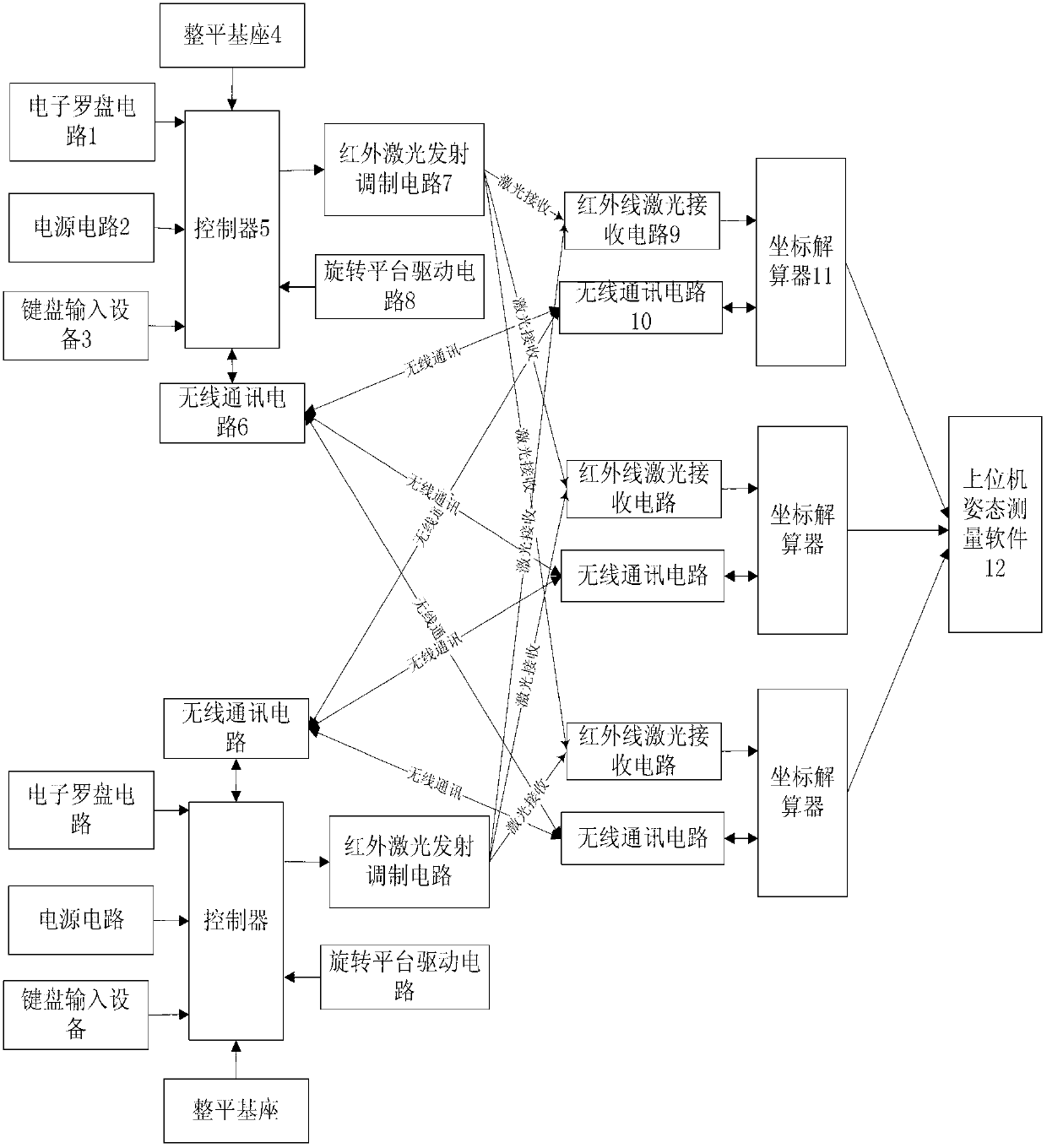
[0047] refer to figure 1 , two sets of transmitters, each transmitter circuit includes an electronic compass circuit 1, a power supply circuit 2, a keyboard input device 3, a leveling base 4, a controller 5, a radio communication circuit 6, an infrared laser emission modulation circuit 7, and a rotating platform drive circuit 8. Multiple groups of receiving devices, each group of receiving devices have the same circuit including an infrared laser receiving circuit 9 , a radio communication circuit 10 , and a coordinate solver 11 . Host computer 12.
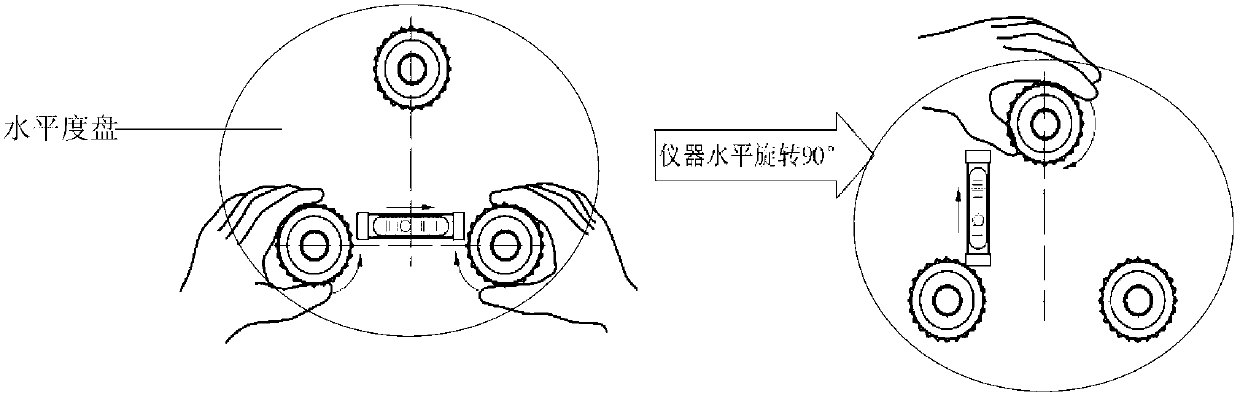
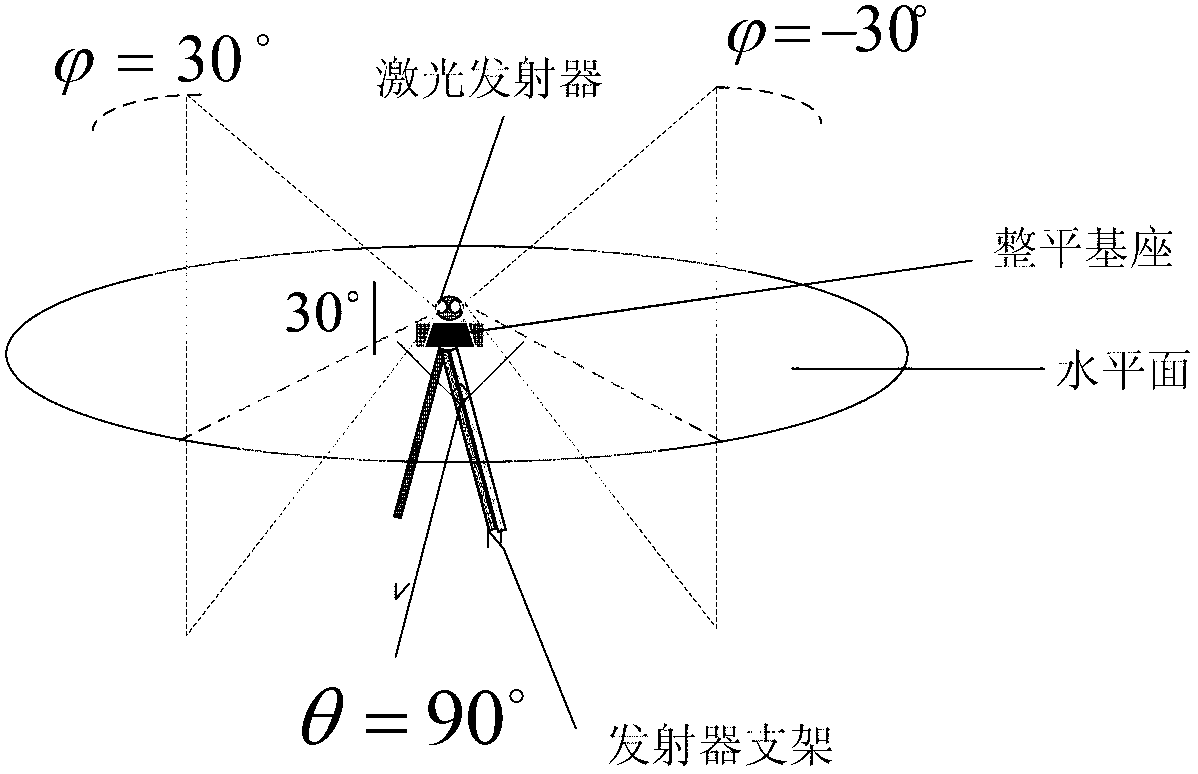
[0048] The leveling base 4 acts on the front of the device, so that the central axis of the launcher is perpendicular to the horizontal plane,
[0049] Establish the z-axis of the measurement coordinate system. It is mainly composed of a tripod, a level dial, a level dial brake screw, and a level tube (see figure 2 ). Looking down at the vial, the air bubble in the vial is located in the center of the vial in the direction o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More