

Multiple-target motion capturing system integrating optical localization and inertia sensing
A technology of inertial sensing and optical positioning, applied in the input/output process of data processing, input/output of user/computer interaction, image data processing, etc., can solve the problem of inability to accurately capture multi-target motion postures and capture images , Unable to determine the coordinate data and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0028] The preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings. It should be understood that the preferred embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
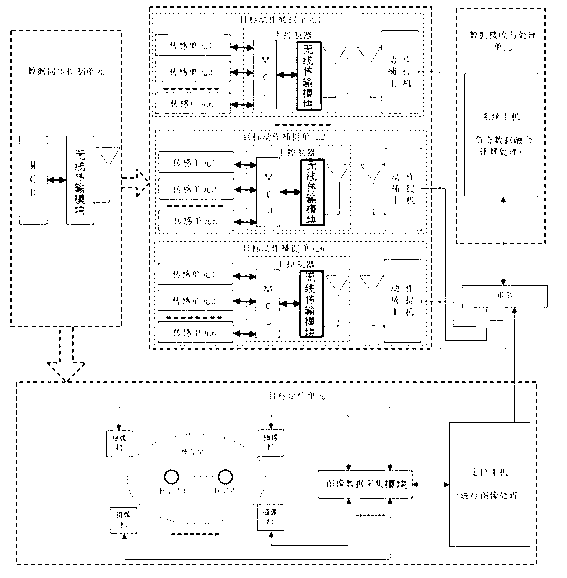
[0029] A multi-target motion capture system fused with optical positioning and inertial sensing, comprising a target motion capture unit, a target positioning unit, a data synchronization control unit, and a data receiving and processing unit, wherein there are multiple target motion capture units;
[0030] Target motion capture unit: under the control of the data synchronization control unit, acquire the motion data at each joint point of the target object, perform fusion calculation on the motion data at each joint point, and transmit the calculation result to the data receiving and processing unit data processing;
[0031] Target positioning unit: under the contr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More