

Method for estimating additive fault size of executing agency of satellite attitude control system through second order Kalman filtering algorithm
A satellite attitude control and actuator technology, which is applied in general control systems, control/regulation systems, electrical testing/monitoring, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0018] Specific implementation mode 1: A method for estimating the additive fault size of the actuator of the satellite attitude control system by using the second-order Kalman filter algorithm
[0019] Follow these steps:
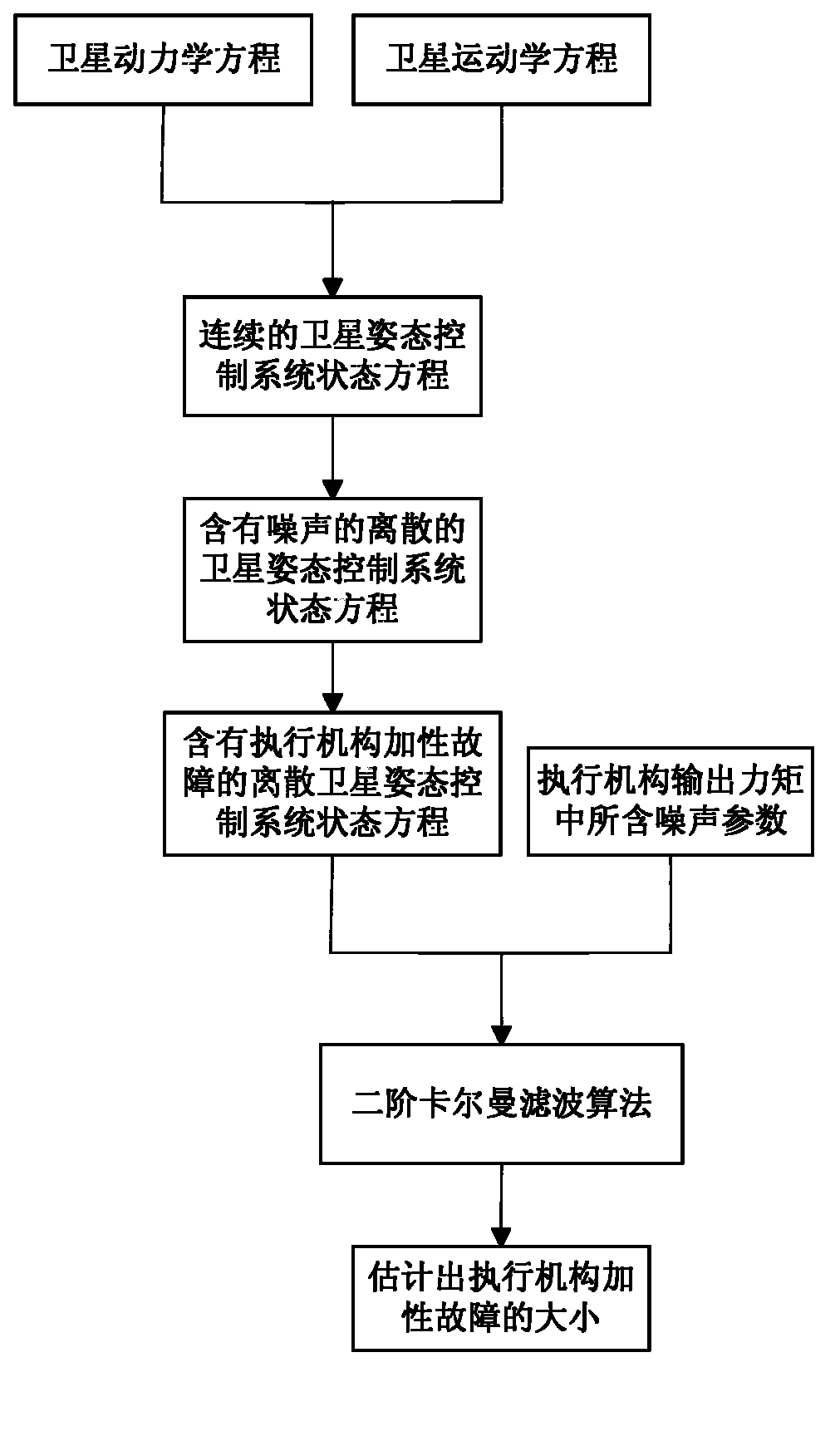
[0020] 1. Establish a discrete satellite attitude control system model according to the satellite attitude dynamic equation and kinematic equation;
[0021] 2. For the noise vector w in the discrete satellite attitude control system model k and v k Calibrate during actual operation;
[0022] 3. Establish the mathematical model of the discrete satellite attitude control system with the additive fault of the actuator;
[0023] 4. Analyze the output torque of the actuator and measure the white noise vector in the output torque of the actuator
[0024] 5. Transform the above model into the standard form of the second-order Kalman filter algorithm processing model, and use the second-order Kalman filter algorithm to estimate the size of the additive fault...
specific Embodiment approach 2
[0030] Specific implementation mode two: this implementation mode is a further description of specific implementation mode one, and the specific process of step one is:
[0031] 1.1. Establish the state equation of the satellite attitude control system relative to the orbit coordinate system according to the satellite attitude dynamic equation and kinematic equation:
[0032] x · = Ax + Bu y = Cx ;
[0033] where x is the state vector of the state equation of the satellite attitude control system, is the derivative of the state vector of the satellite attitude control system state equation, u is the control input torque vector, y is the output vector; A, B and C are coe...
specific Embodiment approach 3
[0037] Specific implementation mode three: this implementation mode is a further description of specific implementation mode one, and the specific process of step two is:
[0038] 2.1. Introducing a zero-mean white noise vector w into the discrete control system state equation k and v k , and satisfy: E{w k}=0, E{v k}=0, E{v k v j}=Rδ kj , where δ kj is the Kronecker symbol, E is the operation symbol for seeking expectation, and w k is the white noise of the system state vector at time k, v k is the white noise of the measurement vector at time k, w j is the white noise of the system state vector at time j, v j is the white noise of the measurement vector at time j, Q x is the white noise covariance matrix of the system state vector, and R is the white noise covariance matrix of the measurement vector;
[0039] 2.2. Through the actual operation to complete the w k and v k The calibration of these two white noises, according to the formula and E{v k v j}=Rδ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More