Lizard simulated amphibious robot
An amphibious and robotic technology, applied in the field of bionics, can solve problems such as no relevant literature records, and achieve the effects of wide application, strong carrying capacity and high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described below in conjunction with the accompanying drawings.
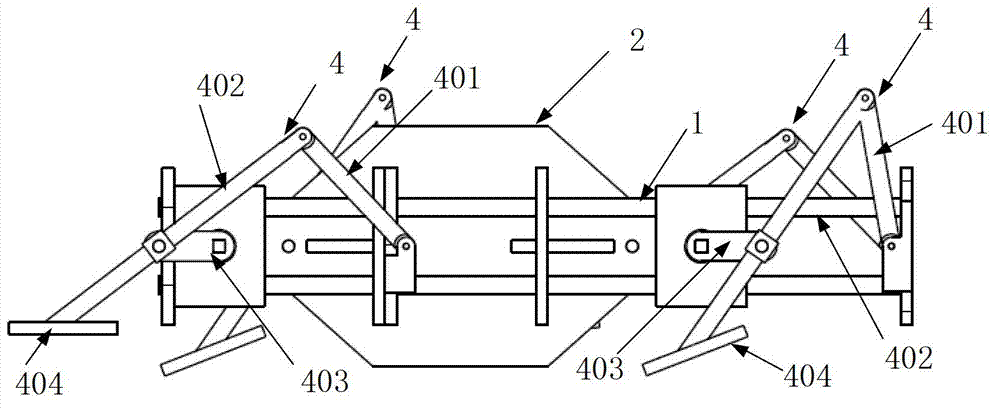
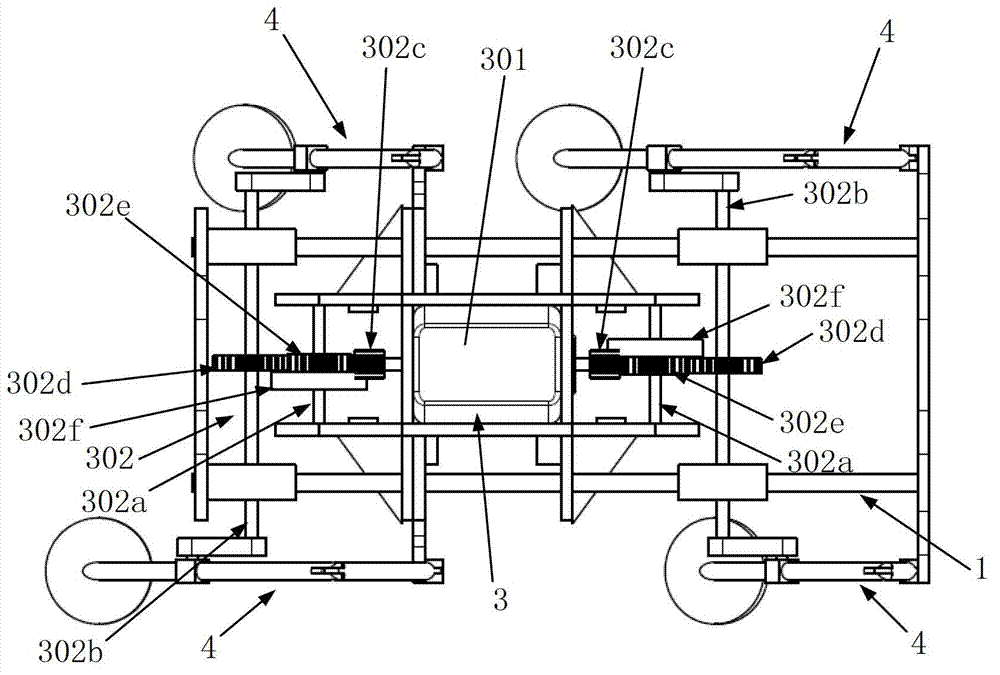
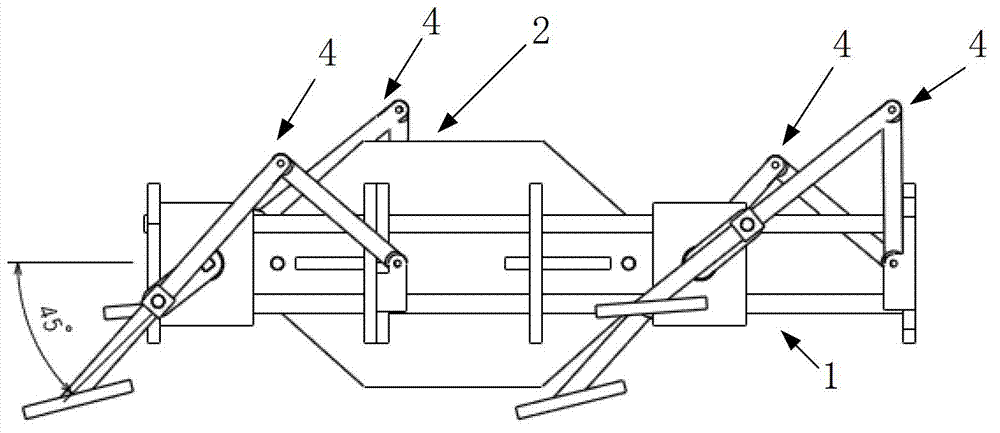
[0034] The bionic lizard amphibious robot of the present invention comprises a body composed of an external frame 1, an internal frame 2, a driving mechanism 3 and legs composed of four sets of crank rocker mechanisms 4, such as figure 1 , figure 2 shown.
[0035] Wherein, the outer frame 1 is a rectangular frame composed of a left baffle, a right baffle, a front baffle and a rear baffle; the inner frame 2 is located inside the outer frame 1 and is a well-shaped frame composed of left and right side panels and front and rear side panels. Structure; the internal frame 2 is used to install the drive mechanism 3 . The thickness of the left and right baffles and the front and rear baffles of the external frame 1, and the left and right side panels and the front and rear side panels of the internal frame 2 are both 2 mm in thickness.
[0036] The driving mechanism 3 inc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More