

Method and device for calibration of workpiece coordinate system, and method and device for workpiece processing
A technology of workpiece coordinates and tool coordinate systems, which is applied in the fields of devices, workpiece processing methods, and calibration of workpiece coordinate systems, and can solve problems such as the inability to complete calibration of workpiece coordinate systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
[0184] see Figure 6 , an embodiment of the calibration device of the workpiece coordinate system of the present invention includes:
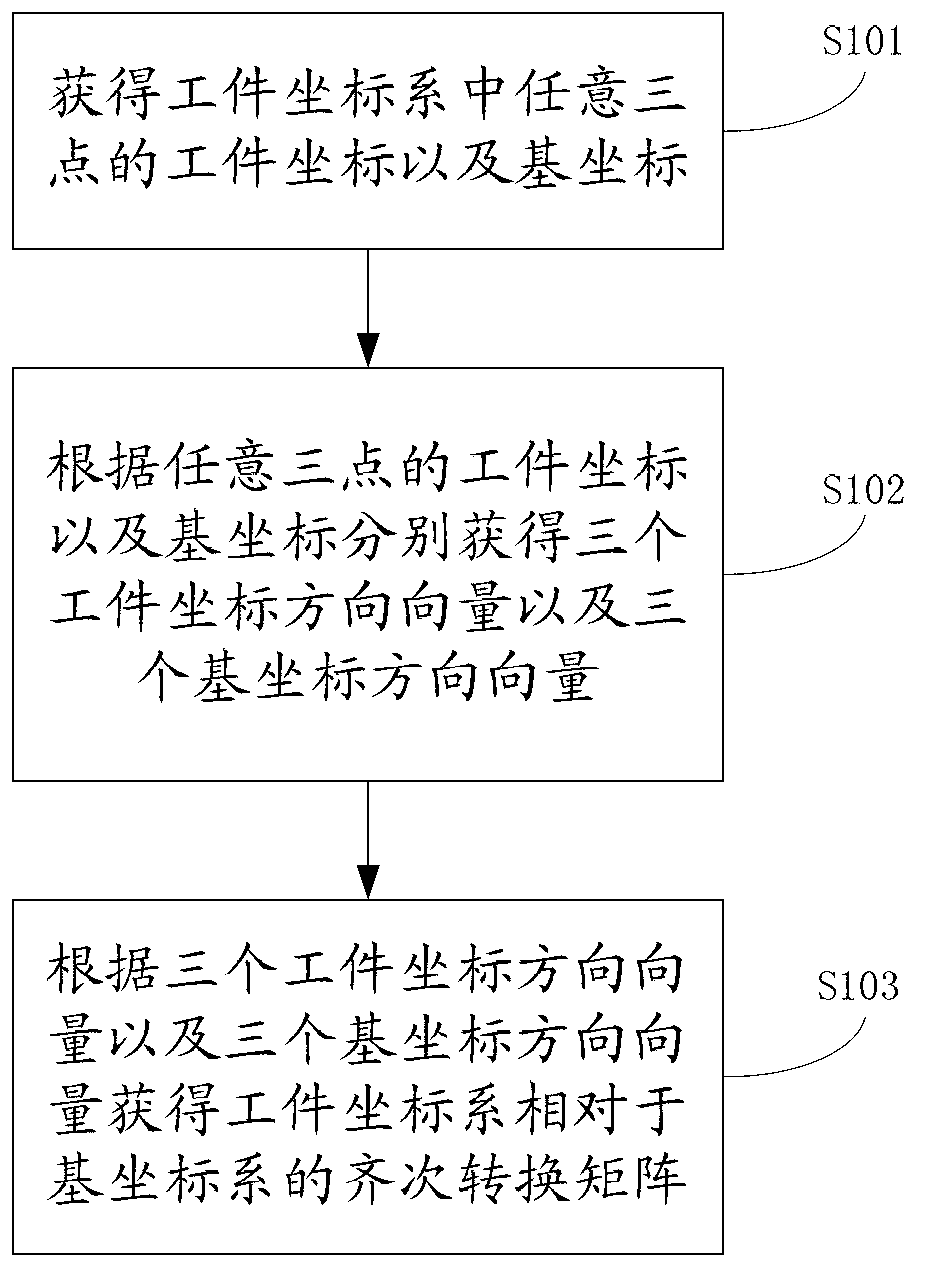
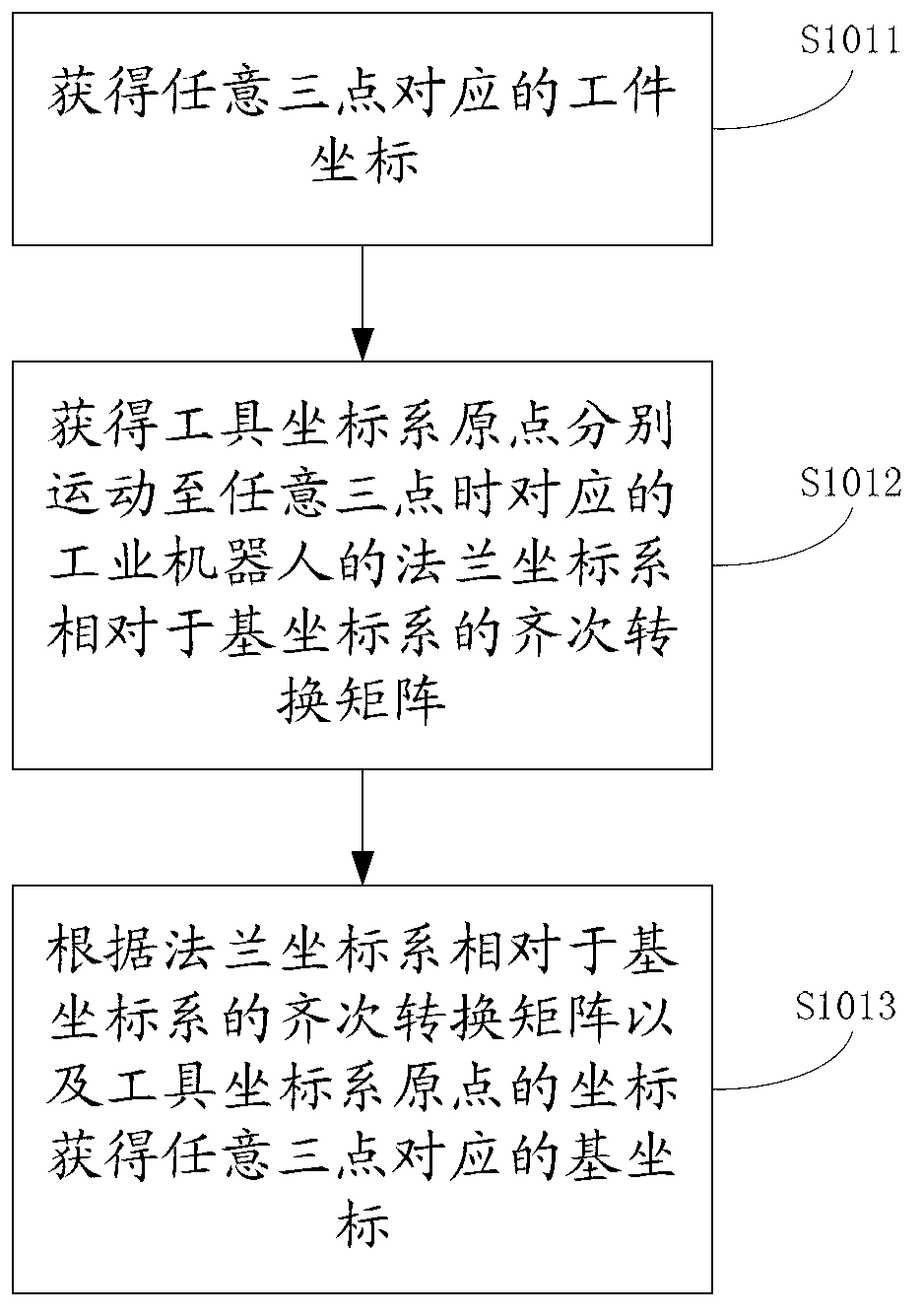
[0185] The coordinate acquisition module 301 is used to move the origin of the tool coordinate system of the industrial robot to any three points that are not collinear in the workpiece coordinate system of the industrial robot, and obtain the workpiece coordinates of any three points in the workpiece coordinate system and the coordinates of the industrial robot in the workpiece coordinate system. The base coordinate in the base coordinate system.
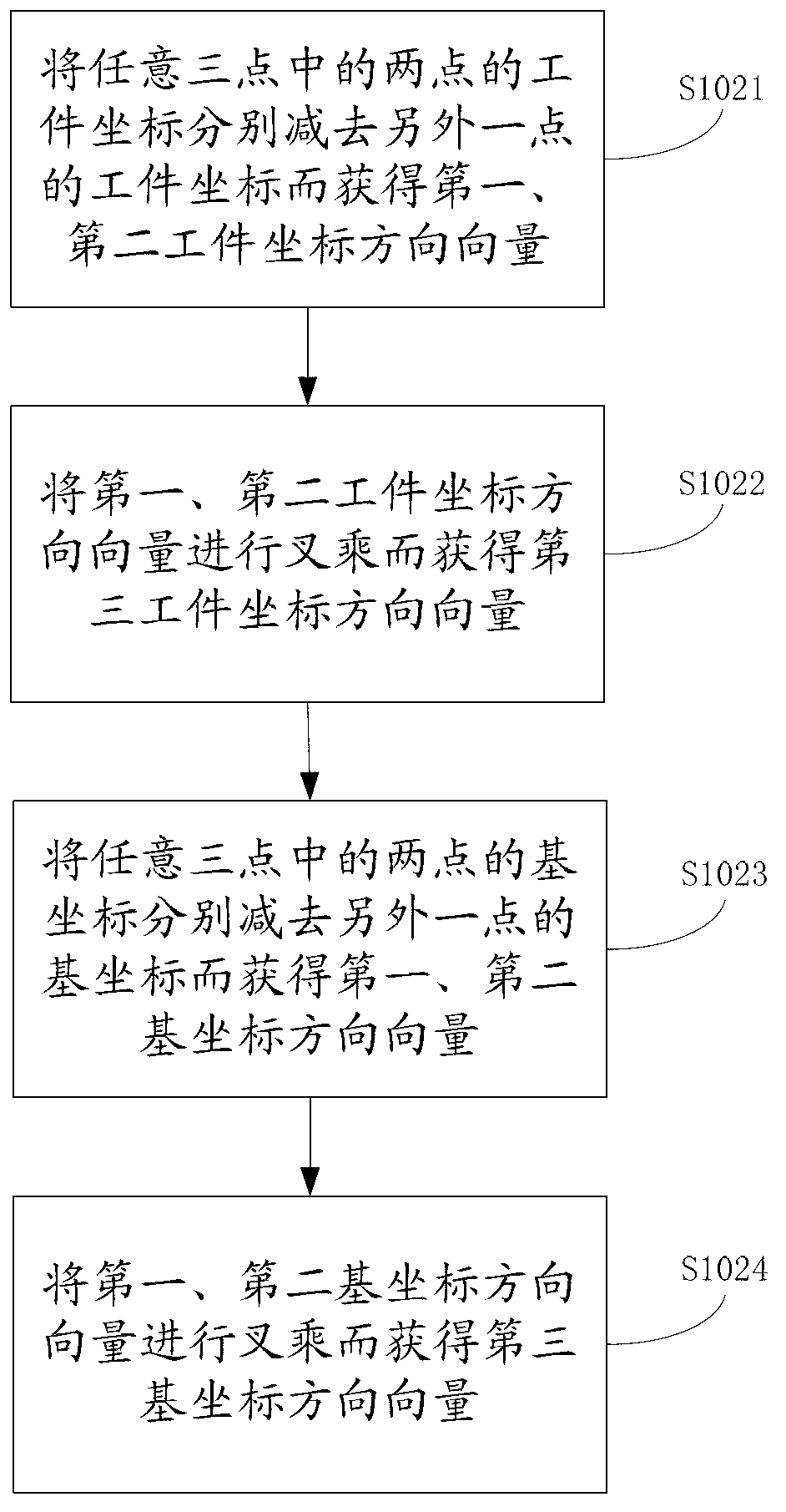
[0186] The direction vector acquisition module 302 is configured to obtain three workpiece coordinate direction vectors and three base coordinate direction vectors respectively according to the workpiece coordinates and base coordinates of any three points obtained by the coordinate acquisition module 301 .
[0187] The homogeneous transformation matrix acquisition module 303 is configured to obtai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More