

Multi-model self-adaptive controller and control method of zero-order closely-bounded nonlinear multivariable system
An adaptive controller and non-linear technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of limited identification ability of linear identification model and the inability of multiple linear models to guarantee control performance, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The following will clearly and completely describe and discuss the technical solutions in the embodiments of the present invention with reference to the accompanying drawings of the present invention. Obviously, what is described here is only a part of the examples of the present invention, not all of the examples. All other embodiments obtained by those of ordinary skill in the art without creative work, all belong to the protection scope of the present invention.
[0043]In order to facilitate the understanding of the embodiments of the present invention, the following will take specific embodiments as examples for further explanation and description in conjunction with the accompanying drawings, and each embodiment does not constitute a limitation to the embodiments of the present invention.
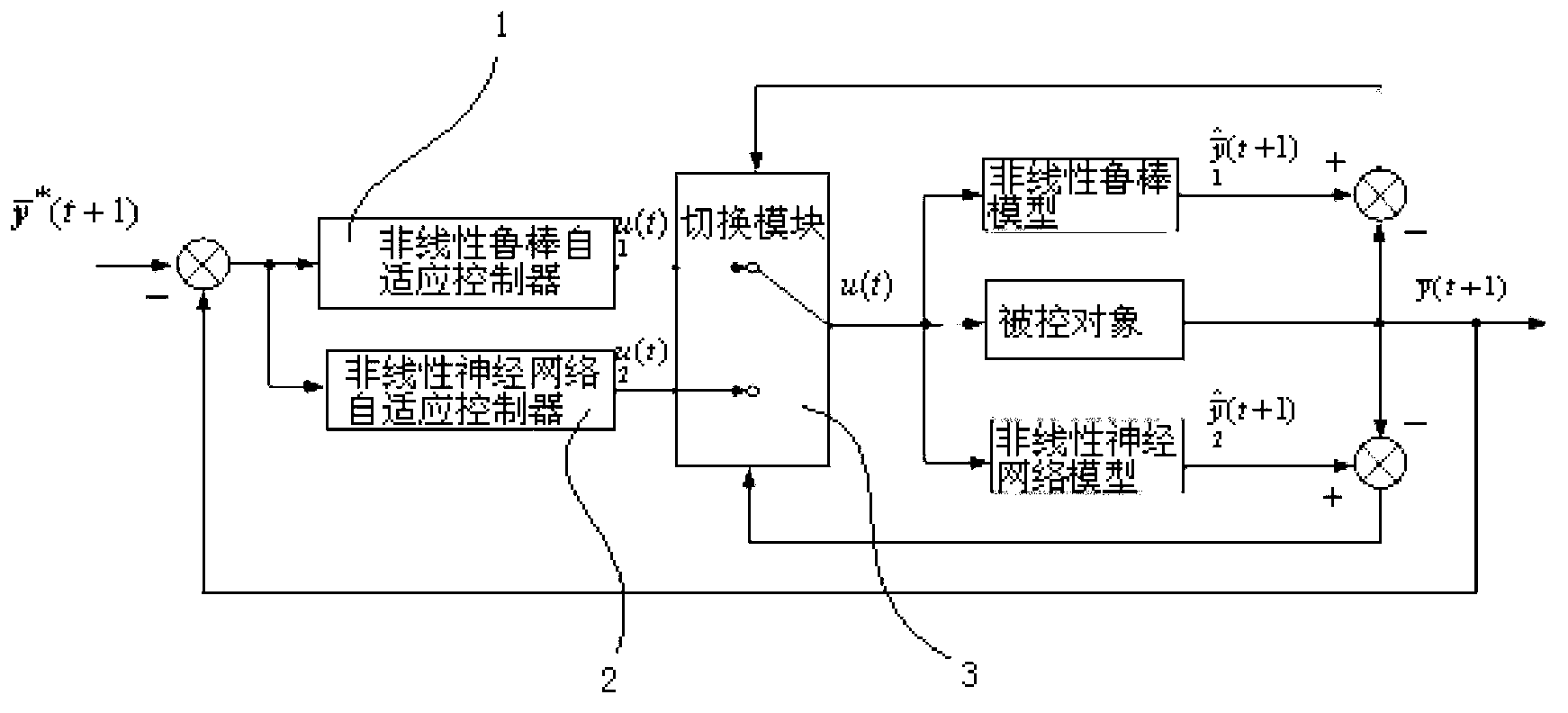
[0044] as attached figure 1 As shown, the multi-model adaptive controller proposed by the present invention includes a nonlinear robust adaptive controller 1 , a nonlinear neur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More