

Path planning method based on genetic algorithm
A genetic algorithm and path planning technology, applied in genetic models and other directions, can solve problems such as poor speed, poor applicability, and poor stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The present invention will be further described below in conjunction with the accompanying drawings.
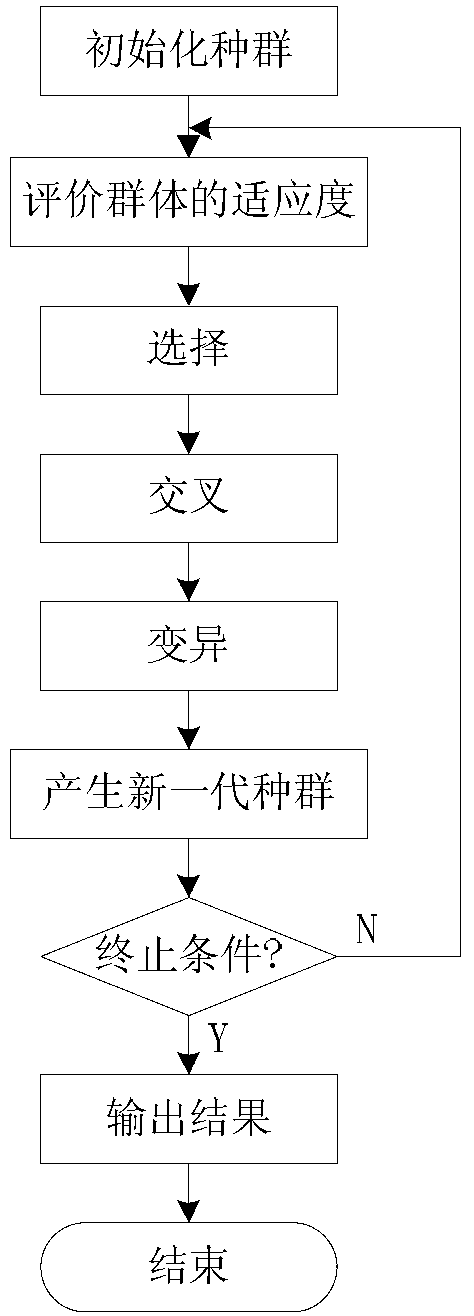
[0064] refer to Figure 1 to Figure 6 , a method for path planning based on genetic algorithm, said planning method comprising the following steps:
[0065] (1) Establish a path optimization mathematical model, as follows:
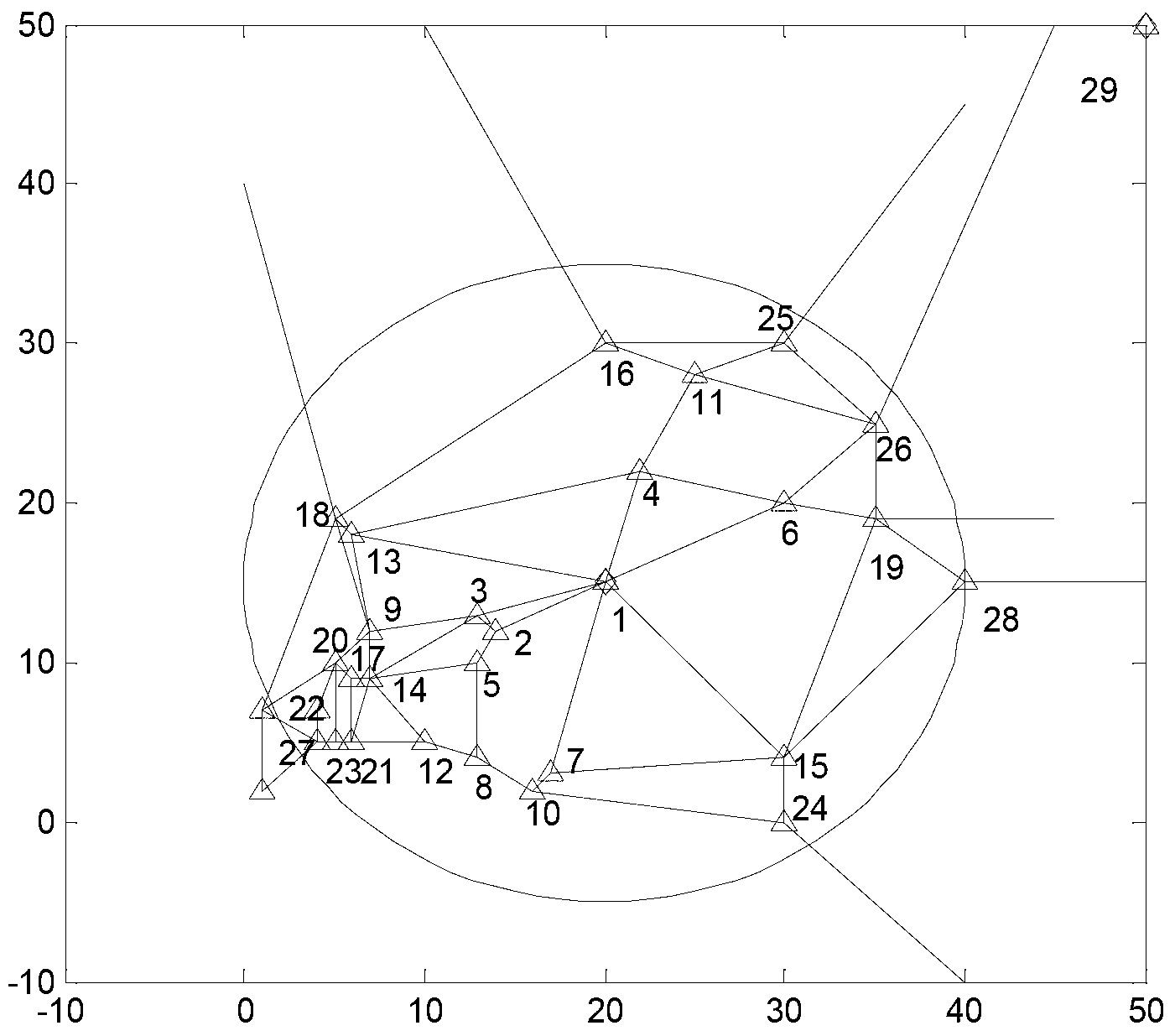
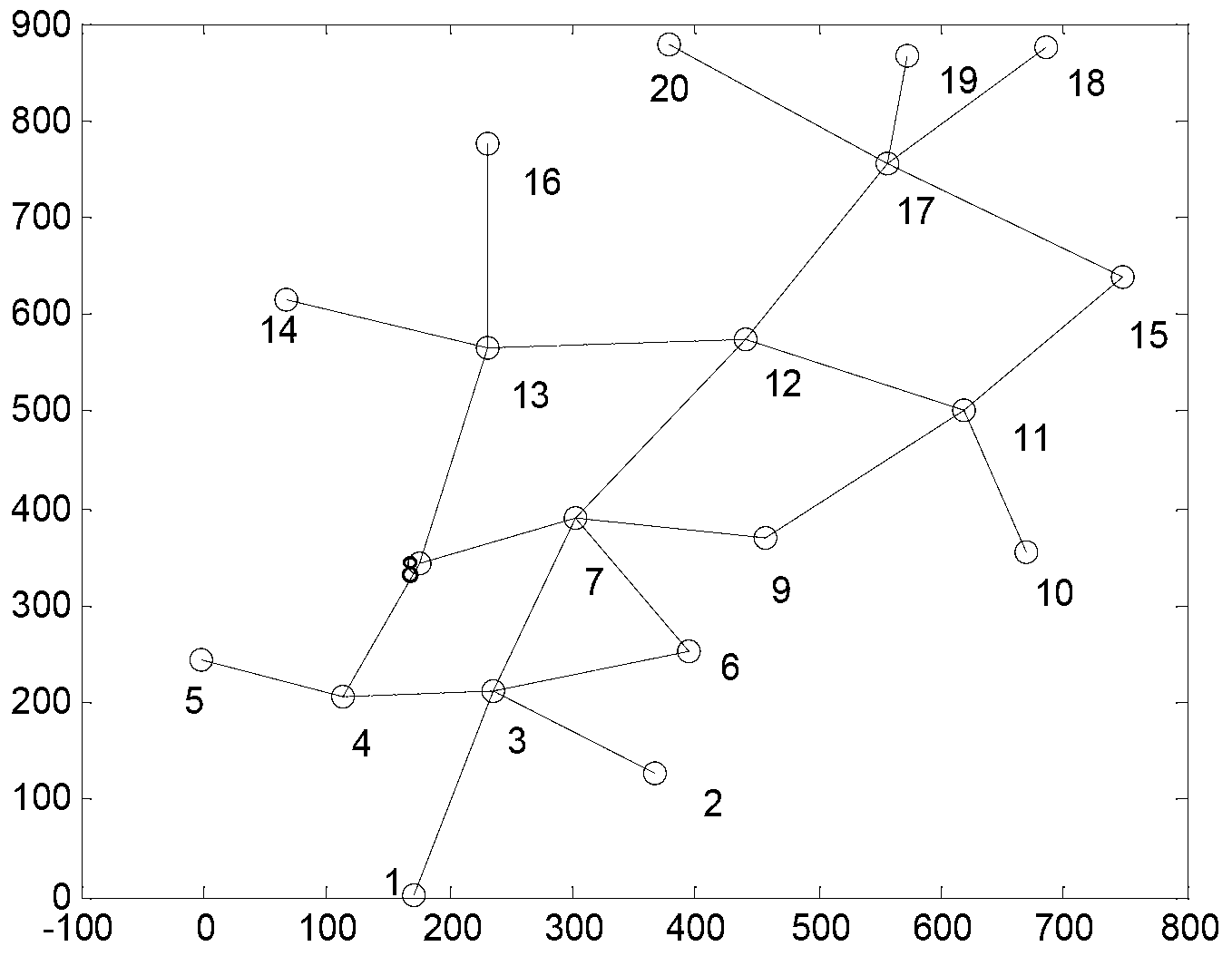
[0066] The path optimization problem is similar to the traveling salesman problem (TSP). Let V={1,2,3,...,n} represent the collection of nodes (intersections), where n>1 is the number of intersections; E is the collection of road sections. Suppose G=(V,E) is a graph with positive weight; edge (section) i→j is the connection between nodes i and j, and the weight is the distance d ij ; c ij Indicates its connectability, where c ij =1 means that i to j can be directly reached, c ij =∞ means that i to j are not directly reachable; x ij Indicates whether road segment i→j is included in the path.
[0067] Let G be a path from the starting point 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More