

Method for designing monocular vision odometer with light stream method and feature point matching method integrated
A technology of feature point matching and design method, applied in the field of computer vision, can solve the problem of low precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
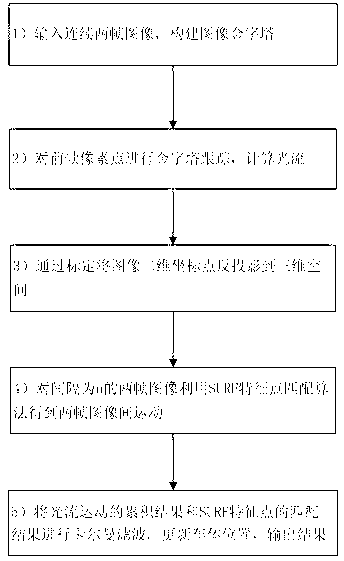
[0067] The present invention requires real-time image collection and real-time calculation and positioning. Therefore, in order to take advantage of the fast computing speed of the present invention, the image collection scene must be approximately a plane. The image acquisition of the present invention is a cyclic process, and the optical flow method is used to estimate the vehicle body motion for two consecutive frames of images, and the matching results of SURF feature points are used to correct every n frames of images. Therefore, this embodiment takes n=20 frames of images as an example to illustrate the entire process of the present invention.
[0068] Step 1) For two consecutive frames of images I input by the system k and I k+1 , first construct an image pyramid by sampling: the bottom image of the pyramid is the original image, and the bottom image is down-sampled by linear interpolation to obtain the upper layer image whose length and width are halved. ;
[0069] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More