

A new type of intelligent cleaning robot and its control method
A technology of cleaning robot and control method, which is applied in the field of new intelligent cleaning robot and its control, can solve the problems of cumbersome cleaning workflow, poor adaptability, complex terrain conditions, etc., so as to facilitate popularization and application, realize secondary cleaning, and improve safety Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
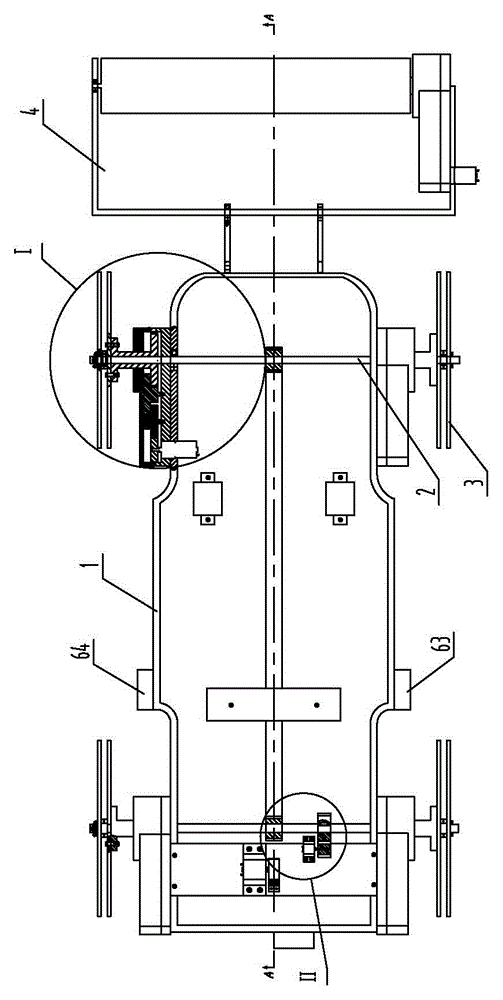
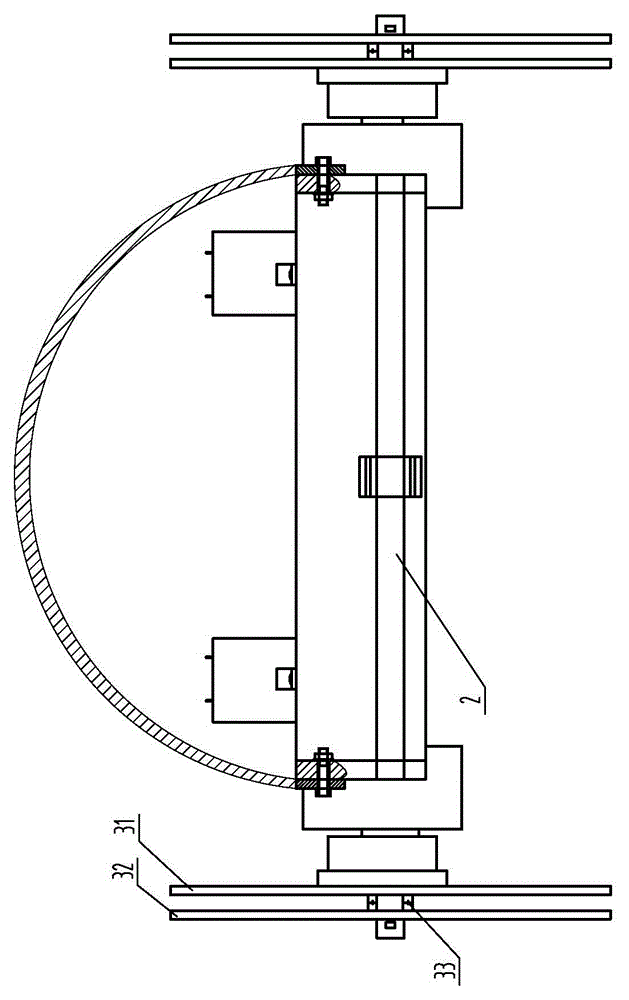
[0052] In the present invention, the side near the middle of the wheel shaft 2 is defined as the inner side, and the side near the end of the wheel shaft 2 is defined as the outer side accordingly; the end of the spoke 36 away from the hub 35 is defined as the outer end; The forward direction is the reference, the head of the body 1 is defined as the front, and the tail of the body 1 is defined as the rear accordingly.
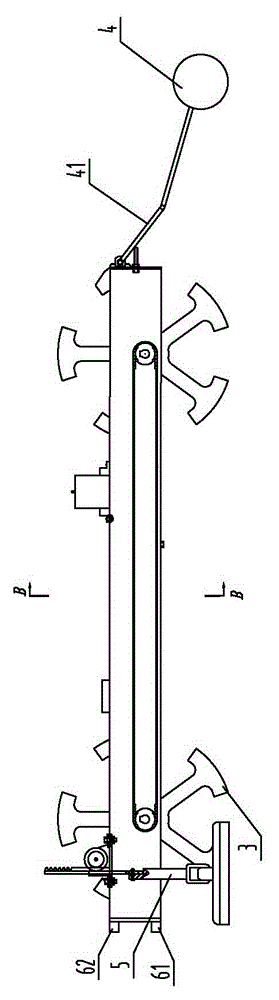
[0053] In this embodiment, the number of spokes 36 in both the inner spoke wheel body 31 and the outer spoke wheel body 32 is five for illustration. Such as figure 1 As shown, the body 1 is equipped with a walking and climbing mechanism, an identification and obstacle avoidance module 6 , a dust collection device 5 and an electric roller brush 4 .
[0054] The walking and climbing mechanism includes a wheel shaft 2,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More