

Visual positioning method based on robust feature tracking
A visual positioning and robust feature technology, applied in image data processing, instruments, calculations, etc., can solve problems such as unreliable positioning, improve real-time performance and effectiveness, improve feature tracking performance, and increase the probability of iterative convergence Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
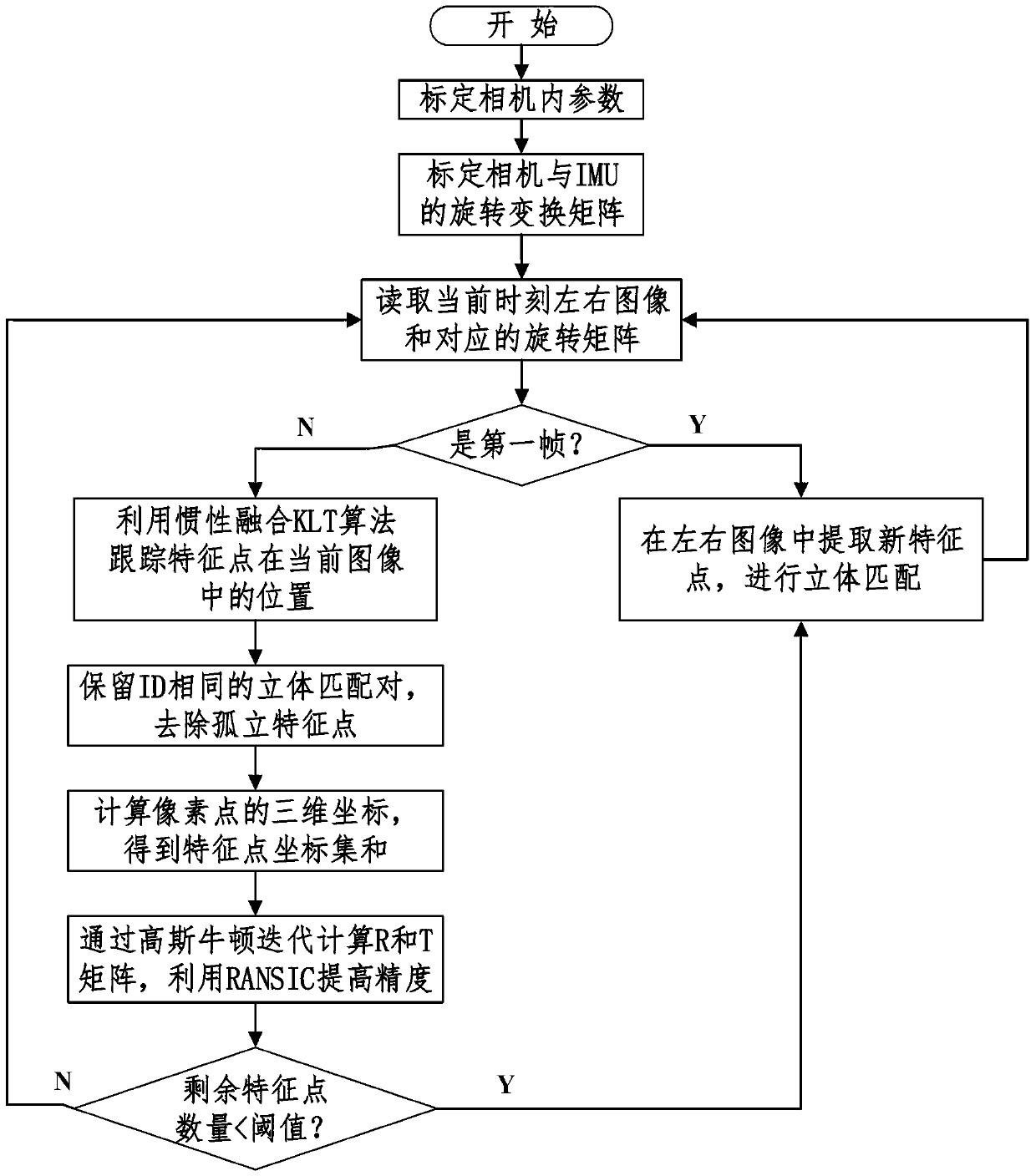
[0033] Below in conjunction with accompanying drawing, the method of the present invention is described in detail:
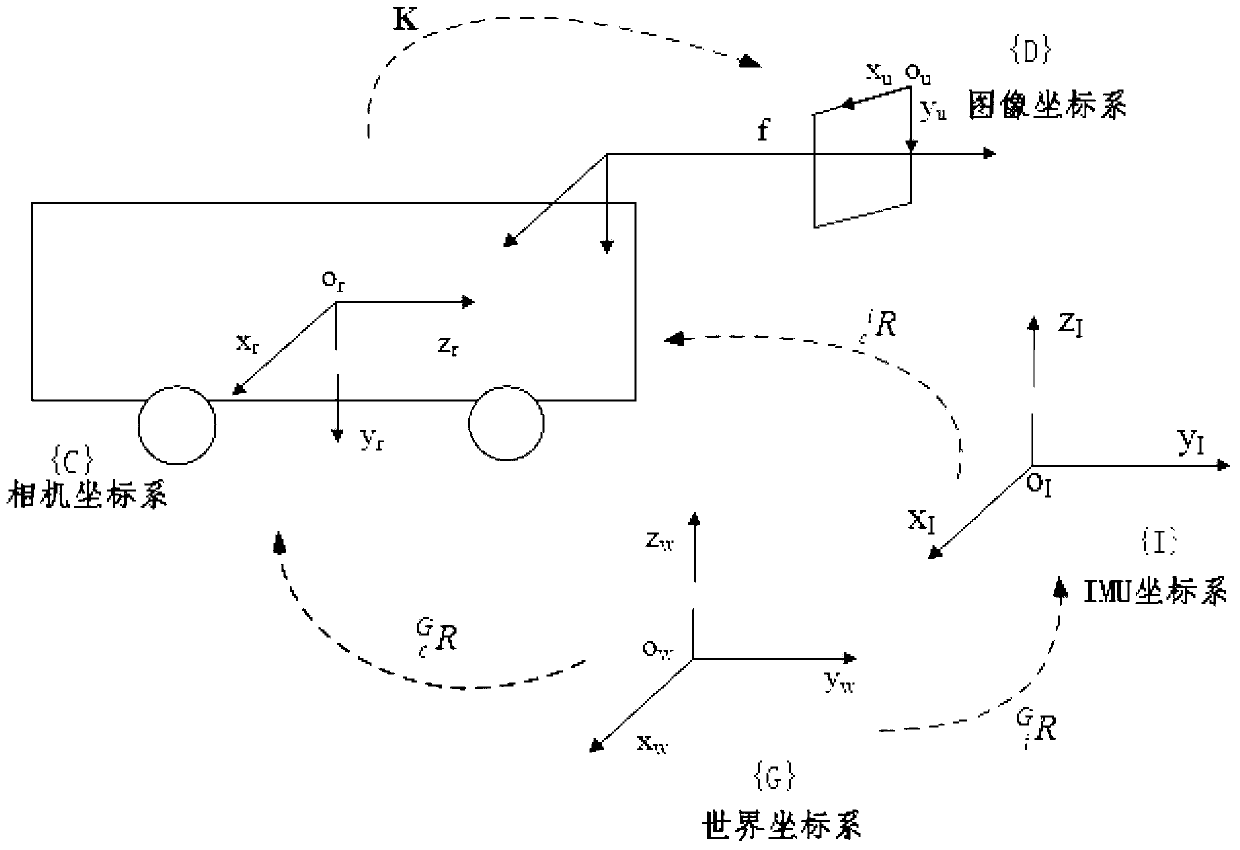
[0034] Step 1: Calibrate the binocular camera and obtain the internal and external parameters of the camera, including: focal length f, baseline length b, image center pixel position u 0 , v 0 , the correction matrix of the entire image, etc. The camera intrinsic parameter matrix is:
[0035] K = f x 0 u 0 0 f y v 0 0 0 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More