

Space manipulator modeling method based on differential geometry
A technology of space manipulators and modeling methods, applied in special data processing applications, instruments, electrical digital data processing, etc., can solve problems such as lack of research results and methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
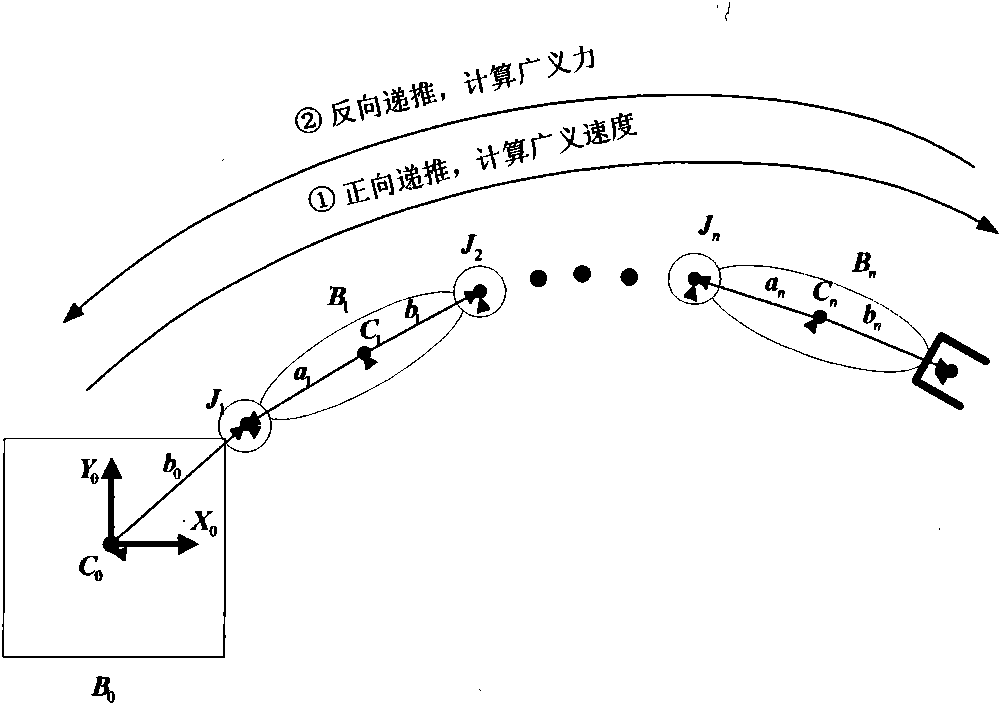
[0067] Embodiment 1, combining figure 1 , the steps of the modeling method based on differential geometry in the present invention are as follows:
[0068] Step 1: Select the zero position of the manipulator system, write out the zero position joint vector S∈se(3), the center of mass joint vector r, and the inertia matrix I.
[0069] Step 2: Calculate the positive definite symmetric matrix J related to the inertial parameters, and the coordinate position matrix M∈SE(3).
[0070] Step 3: Calculate the generalized speed of each connecting rod by forward recursion.
[0071] Step 4: Given the generalized force F acting on the end effector n+1 , calculate the generalized force of each connecting rod by reverse recursion.
[0072] Step 5: Write each quantity as a matrix expression to obtain a compact kinetic equation.
Embodiment 2
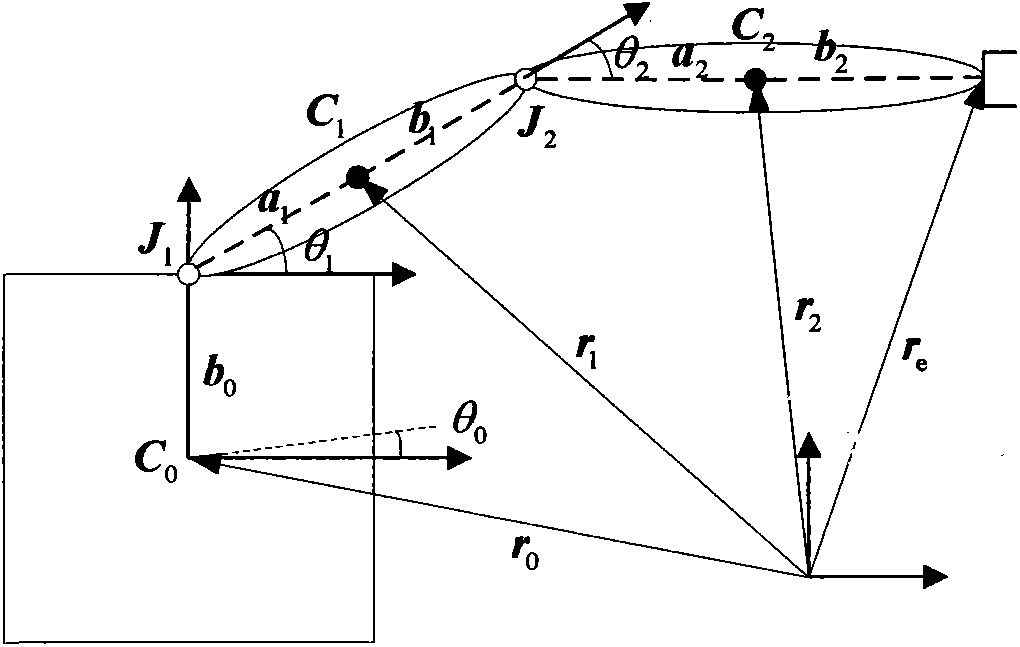
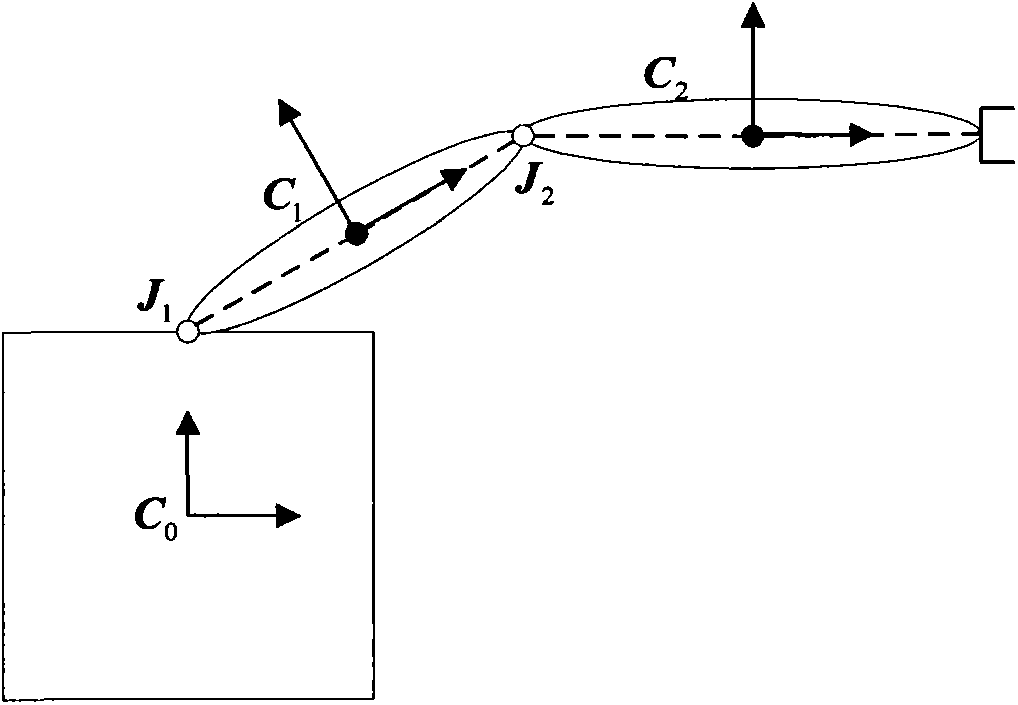
[0073] Example 2, combined with figure 1 , figure 2 , the zero position of the manipulator system studied in the present invention is selected in this way, the center of mass of the base and the joints of the connecting rods are selected as the origin of the fixed coordinate system of the base and the connecting rods at all levels respectively, and the coordinate system of the base is recorded as 0 No., the connecting rods at all levels are marked as i (i=1,...,n), the fixed coordinate system of the end effector is marked as (n+1), and the origin is selected at the end of the connecting rod. According to the conventions of robotics, the joint variables of each link are specified as
[0074]
[0075] with q i =0 is the zero bit.
[0076] For the planar 2R free-flying space manipulator system, the zero joint vector S i =[0 0 1 0 0 0 ] T ; centroid position vector r 0 =[0 0 0] T , r 1 =[a 1 0 0] T , r 2 =[a 2 0 0] T , where a 1 、a 2 Respectively, the graphica...
Embodiment 3
[0077] Example 3, combined with figure 1 , figure 2 , the matrix J defined by the present invention and the coordinate position matrix M ∈ SE (3) are calculated like this,
[0078] J i = I i - m i r ~ i 2 m i r ~ i - m i r ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More