

Polyclonal artificial immune network algorithm for multi-robot dynamic path planning
An artificial immune network, dynamic path technology, applied in instruments, general control systems, two-dimensional position/channel control, etc., can solve problems such as reducing response time and increasing the initial concentration of specific antibodies
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
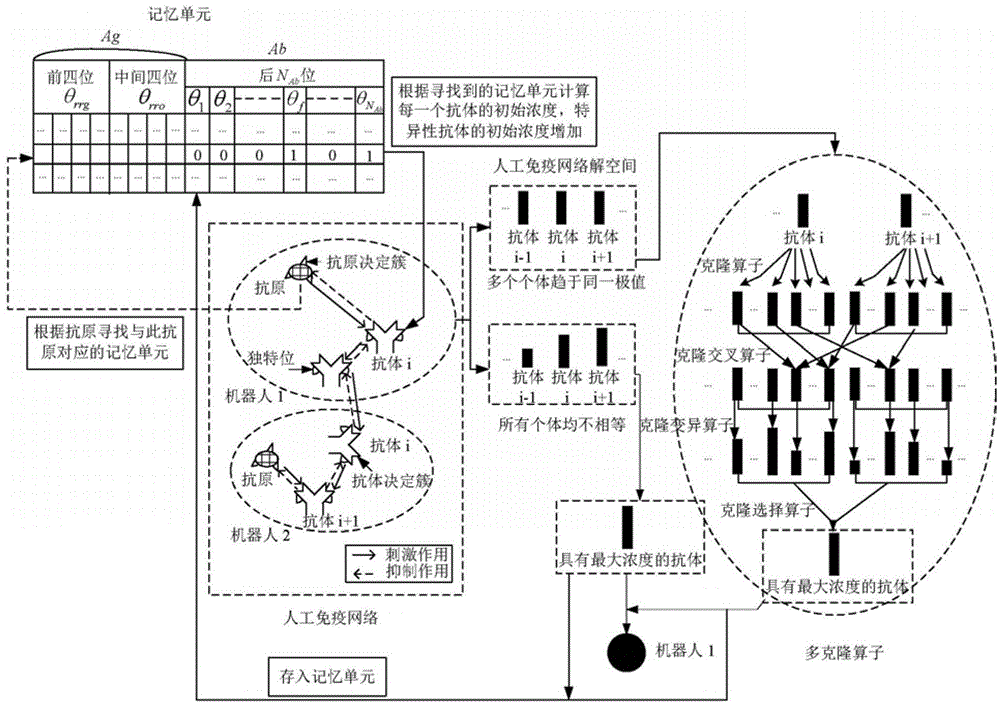
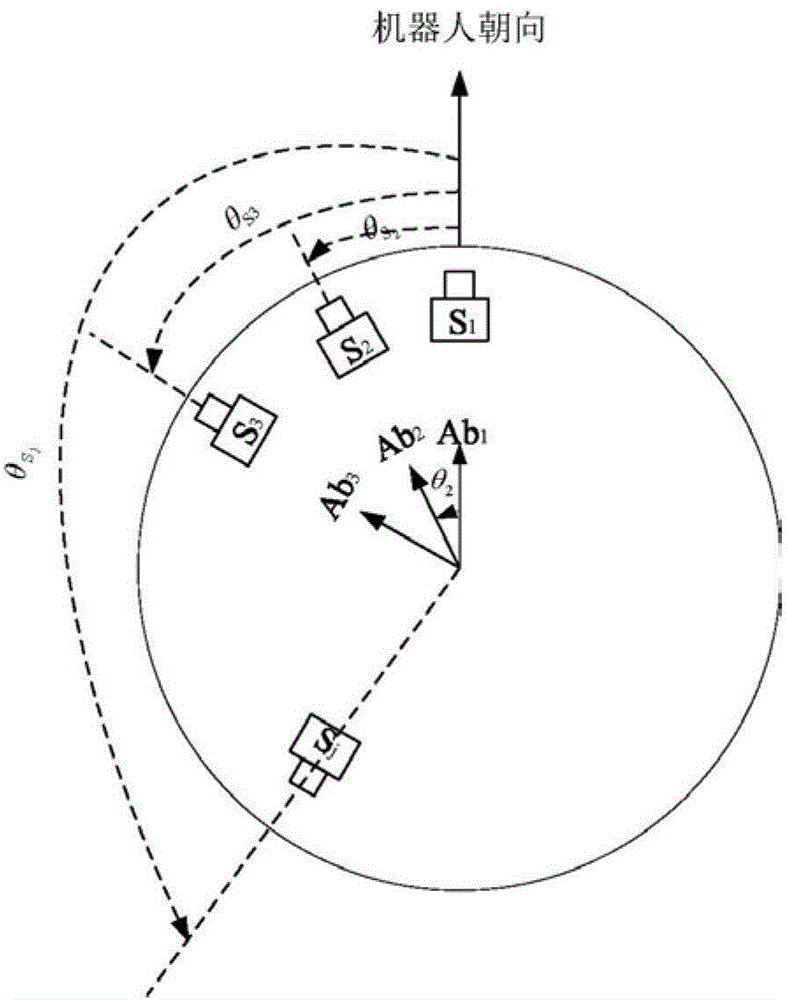
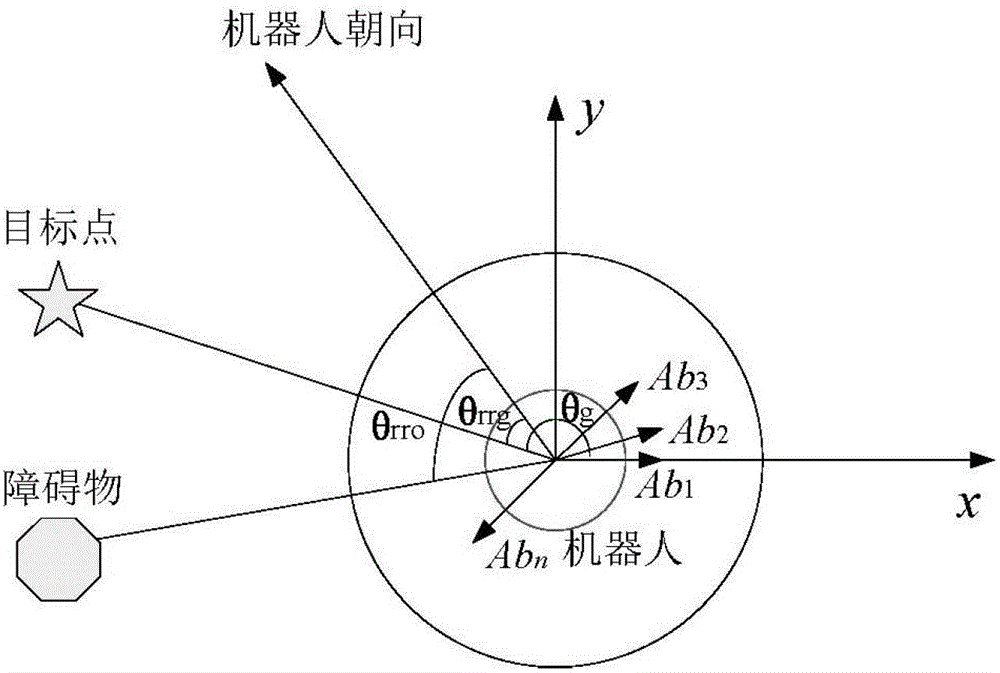
[0049] The present invention is a polyclonal artificial immune network algorithm for dynamic path planning of multiple mobile robots. The algorithm defines antigens and antibodies based on the principle of artificial immune network. The azimuth angle of the surrounding obstacles and target points obtained in the nanosensor data is relative to the angle of the robot's movement direction, and the antibody indicates the next movement direction of the robot. Aiming at the problem of dynamic path planning for multiple mobile robots, considering the interaction between robots and the influence of moving obstacles on the direction selection of robots, based on the dynamic discrete immune network model, a polyclonal artificial intelligence algorithm for dynamic path planning of multiple mobile robots is defined. The formula for calculating the antibody concentration in the immune network algorithm; in addition, by introducing a memory unit, it not only saves the antibody corresponding ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More