

Sole mechanism for robots
A technology of robots and soles, which is applied in the field of robots, can solve the problems of lack of flexibility and adaptability in complex mountainous landforms, and achieve the effects of easy maintenance, improved stability, and good adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
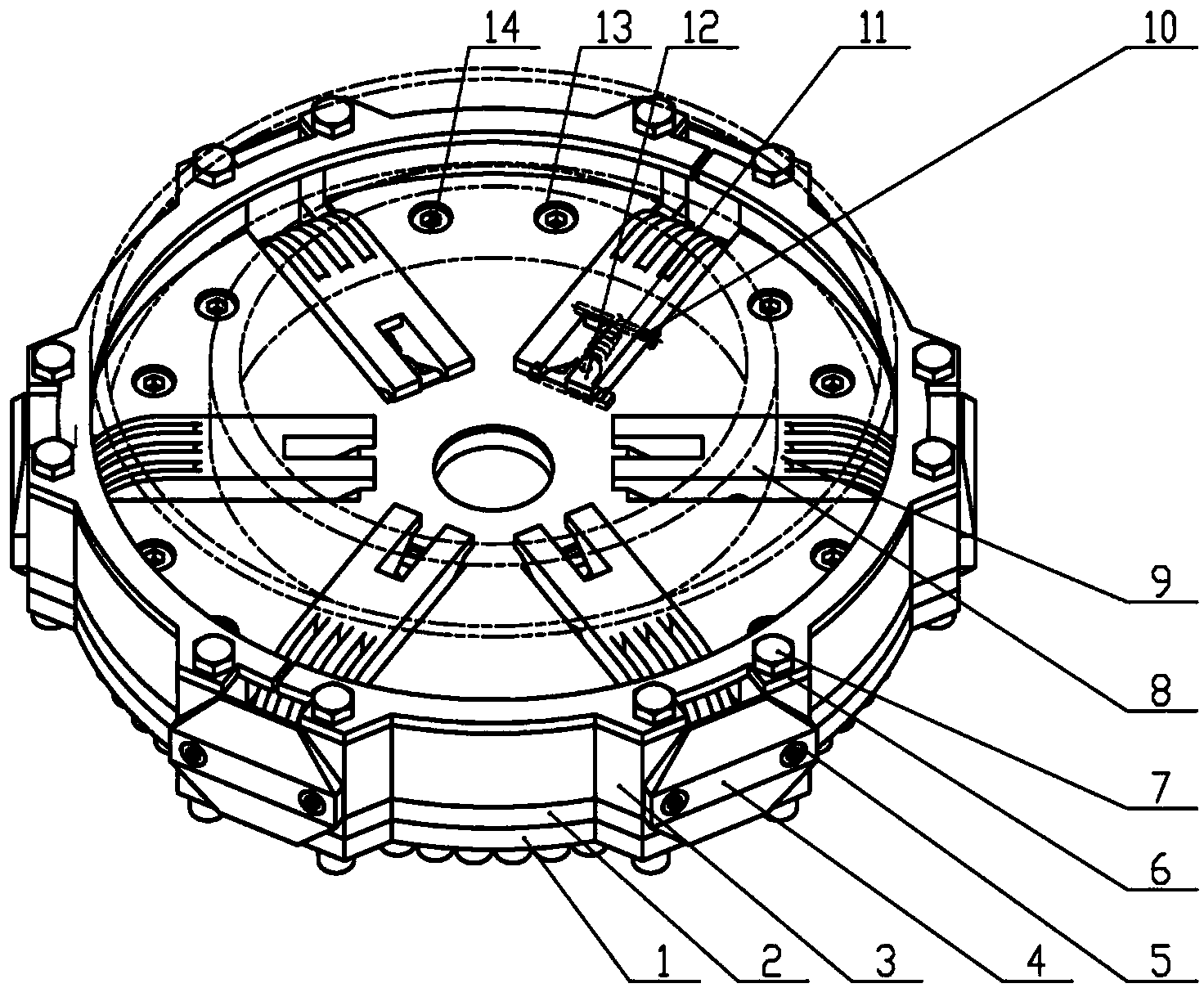
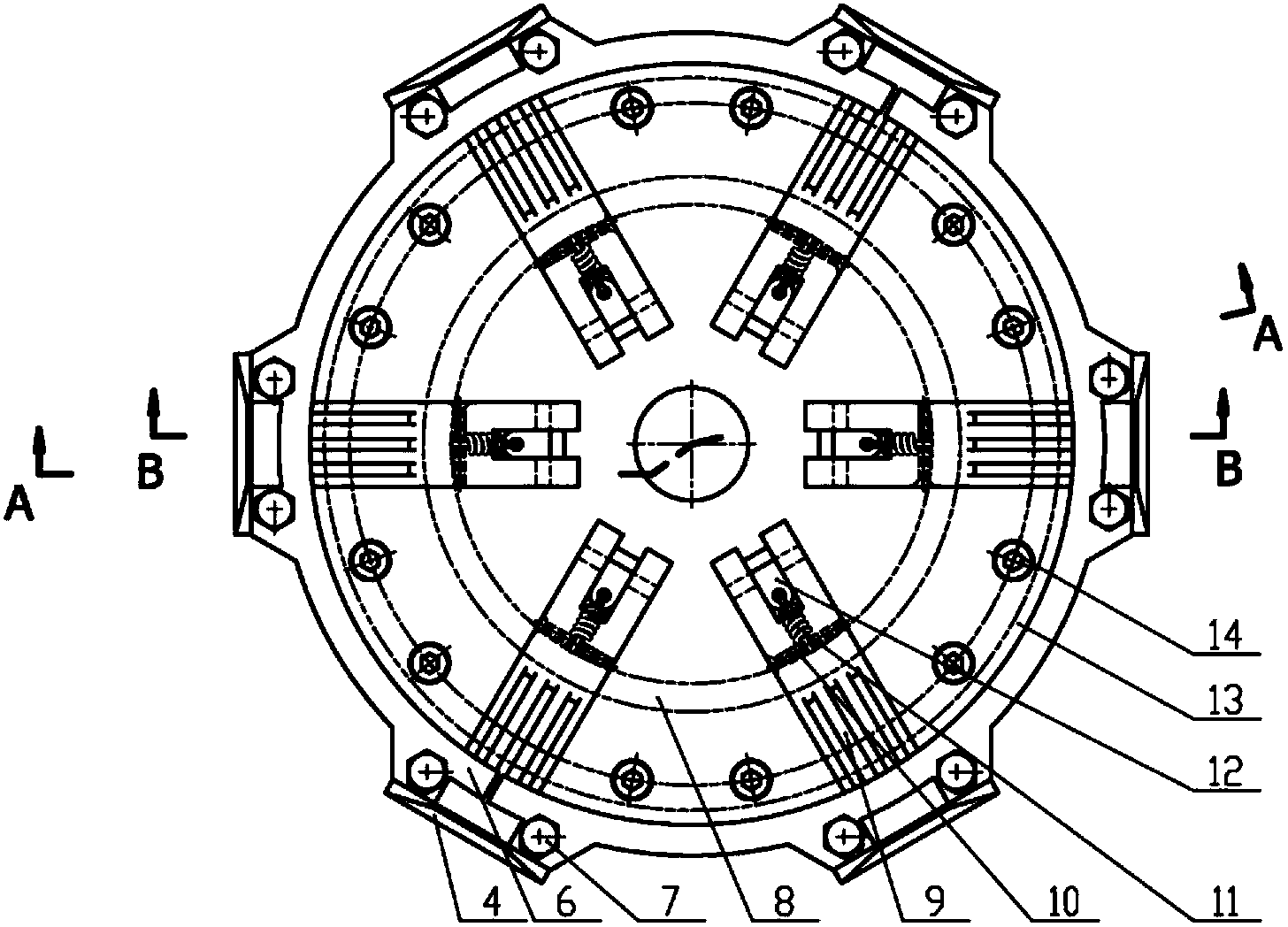
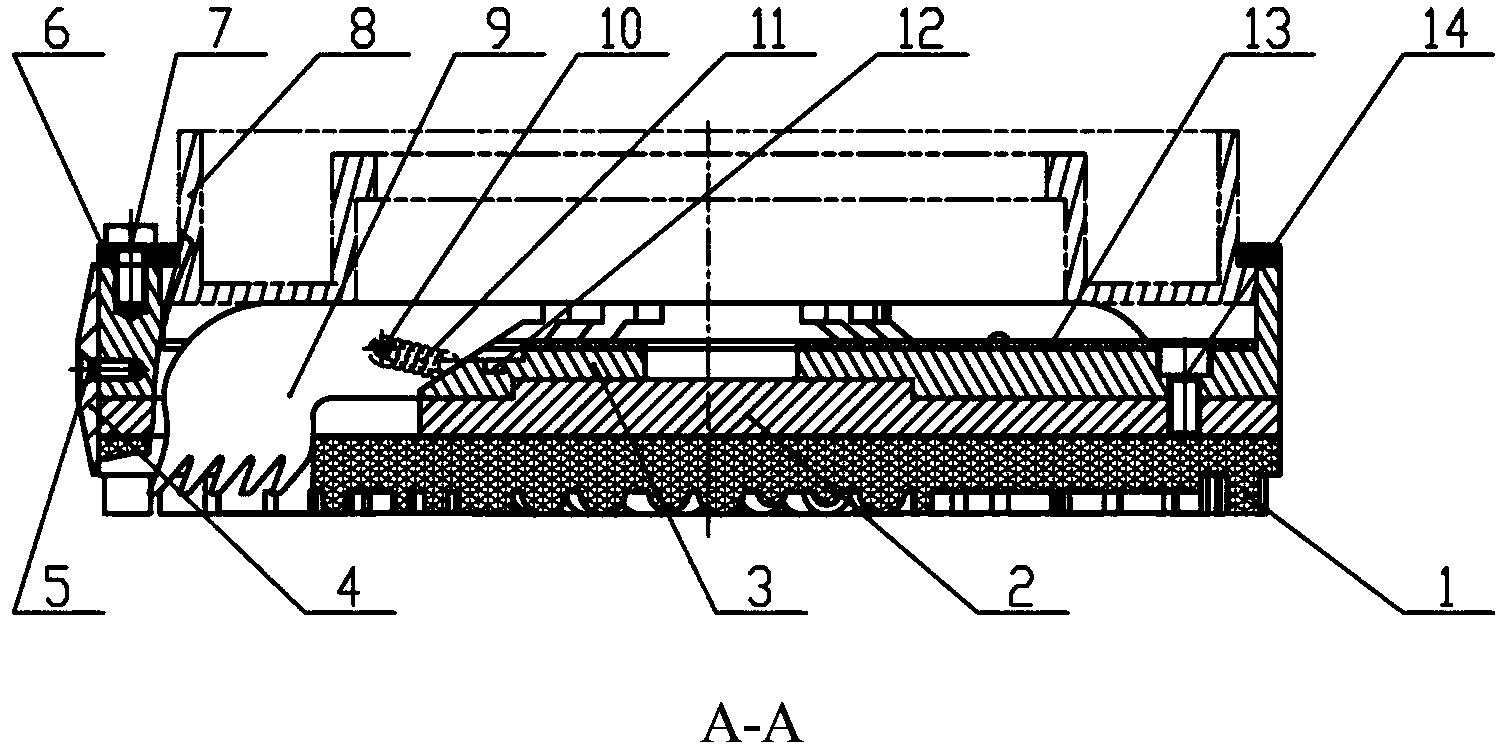
[0010] The specific embodiment of the present invention will be described in detail in conjunction with the drawings and technical solutions: the foot is an auxiliary device independent of the robot foot, and has certain versatility and universality. The composite pattern foot pad is used to improve the basic friction coefficient between the contact surfaces of the soles; the toothed claw block structure is used to penetrate the ground and realize the functions of tension and holding, which improves the gripping ability of the robot's foot end, thereby increasing the overall stability of the foot end. Friction performance; the tension spring structure is used to realize the rapid reset of the claw block, so as to avoid the slow reset speed of the claw block, which will cause the sole of the robot to interfere with the ground after the foot is lifted, which will affect the stability of the robot's walking; A semi-circular platen structure can realize the convenient connection be...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More