

Pipeline flaw detection system navigation and location method based on IMU (Inertial Measurement Unit)
An inertial measurement component, navigation and positioning technology, which is applied in directions such as navigation through speed/acceleration measurement, can solve the problems of being unable to meet the requirements of flaw detection and positioning, difficult to meet the use condition restrictions and positioning accuracy requirements, use condition restrictions, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be described in detail below in conjunction with specific embodiments.
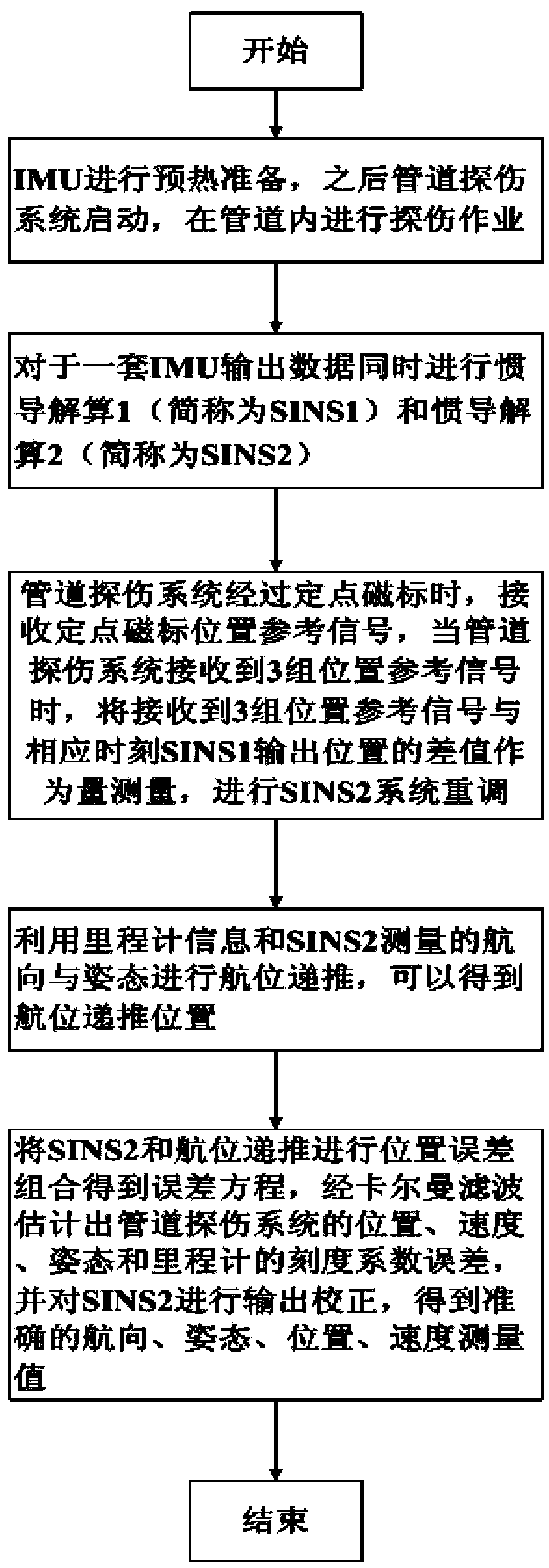
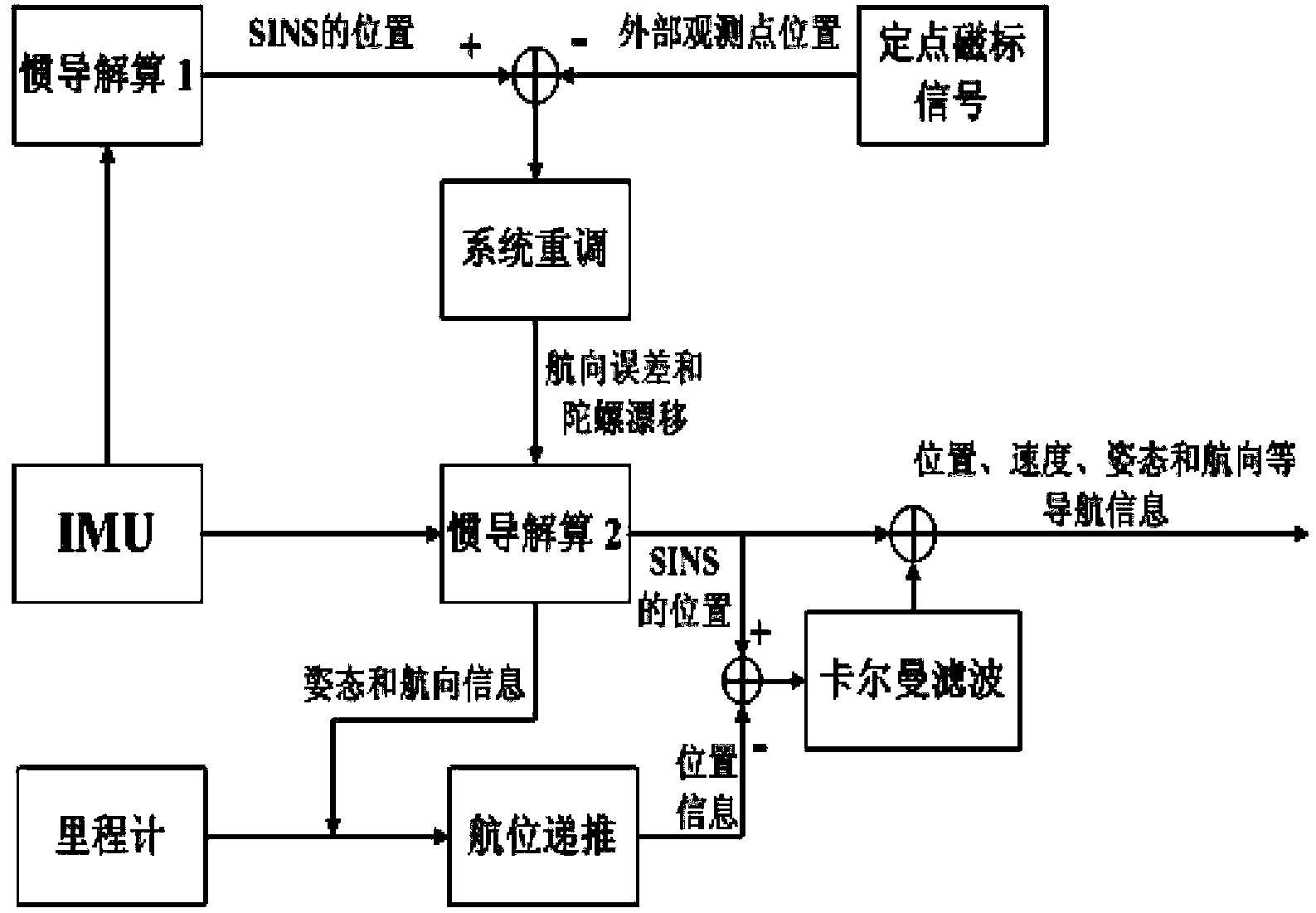
[0038] The pipeline flaw detection system is mainly composed of inertial measurement components and odometers. Among them, the inertial measurement component contains a gyroscope and an accelerometer for measuring inertial data, and an inertial navigation computer module for inertial navigation calculation, system readjustment and Kalman filtering; the odometer is installed on the vehicle of the inertial measurement component The tail of the vehicle moves close to the inner wall of the pipeline, so that the running distance and speed of the vehicle inside the pipeline can be obtained, and this information is transmitted to the inertial navigation computer module. In addition, a fixed-point magnetic mark base station is built every 1-2Km on the pipe wall. When the pipeline flaw detection system passes the current fixed-point magnetic mark, it can directly obtain the positi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More