

Two-stage buffer foot device applicable to obstacle crossing robot
A technology of robots and walking robots, which is applied in the fields of motor vehicles, transportation and packaging, etc., and can solve problems such as easy wear and tear, affecting the service life of sensors and acquisition accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described in detail below in conjunction with the accompanying drawings.
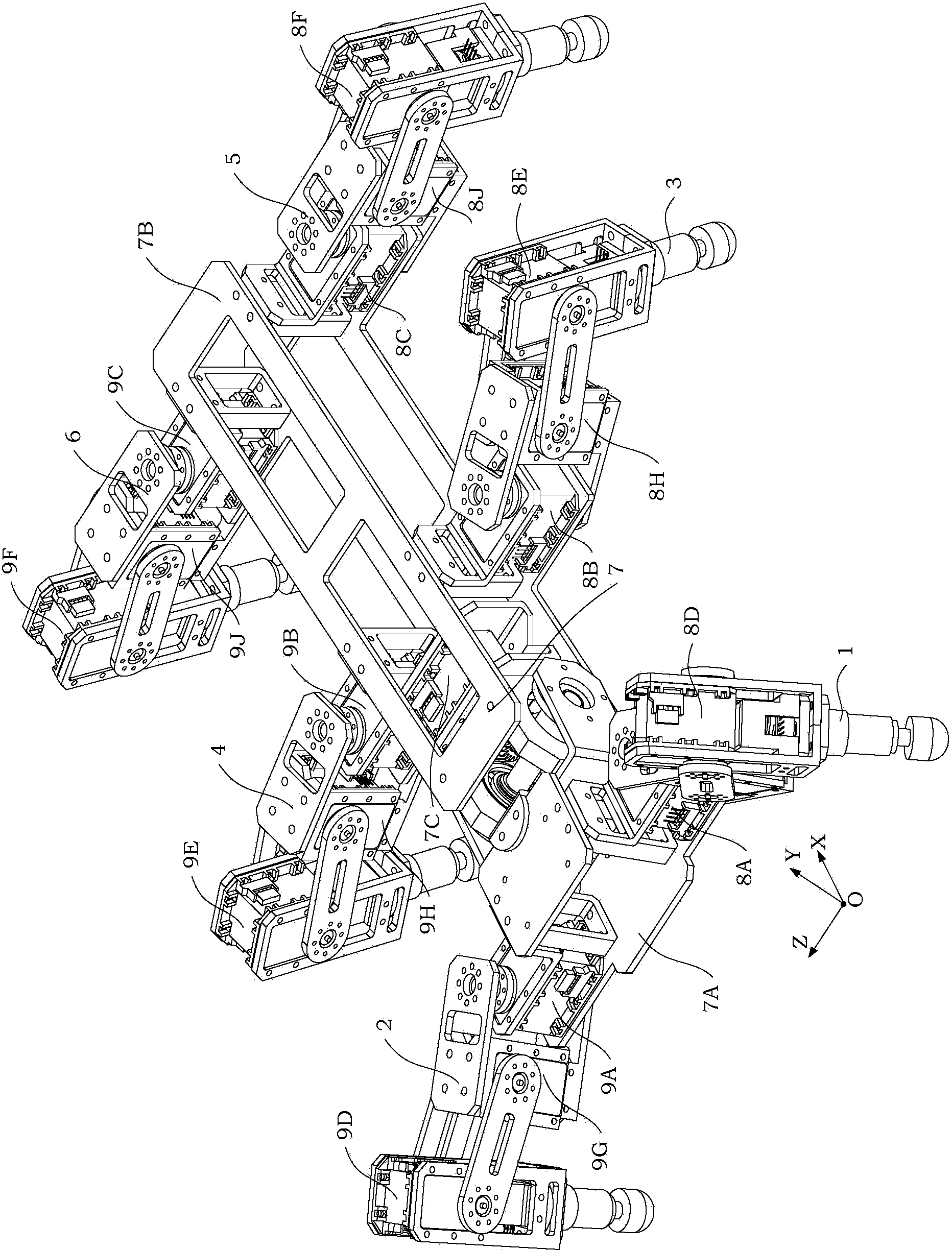
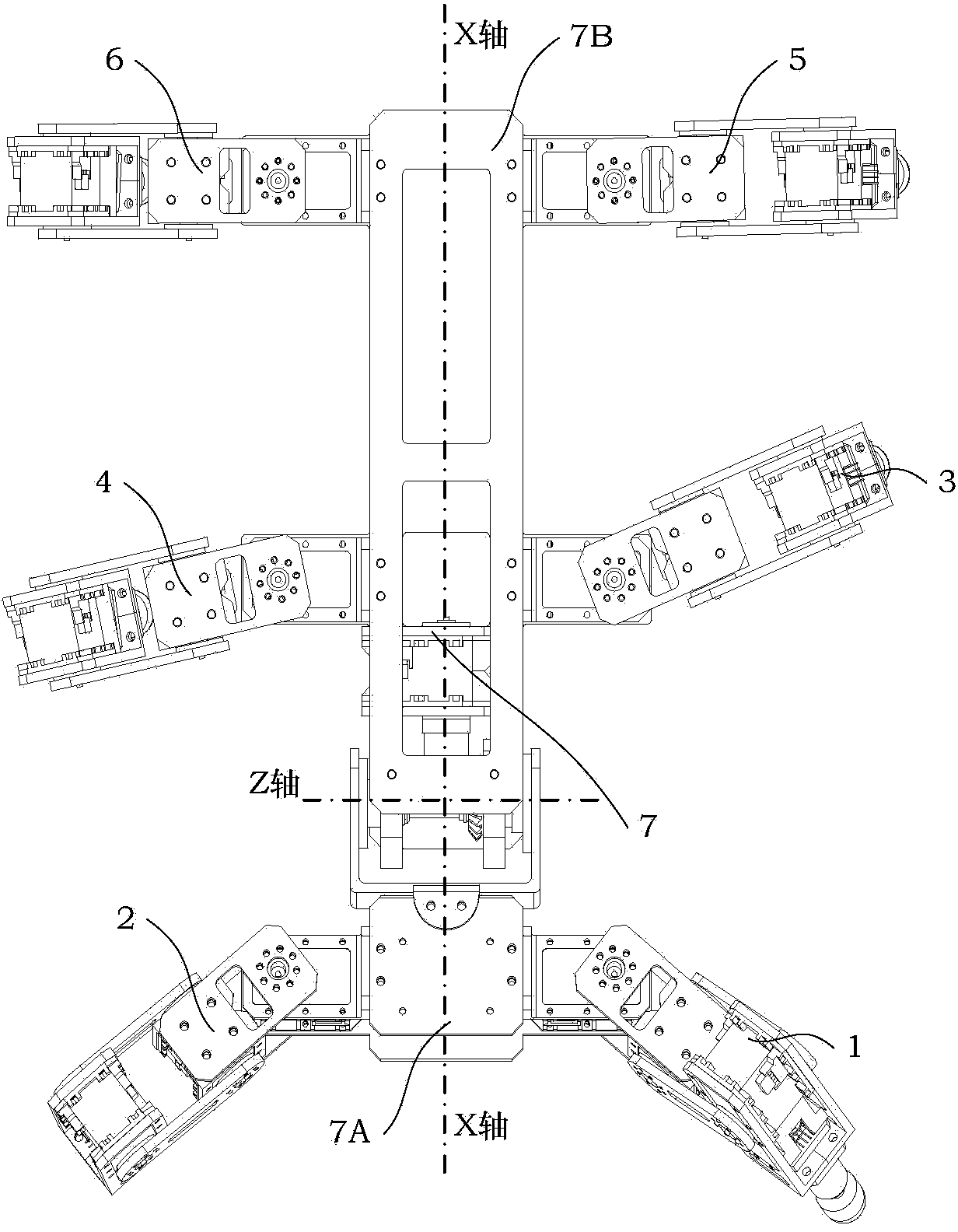
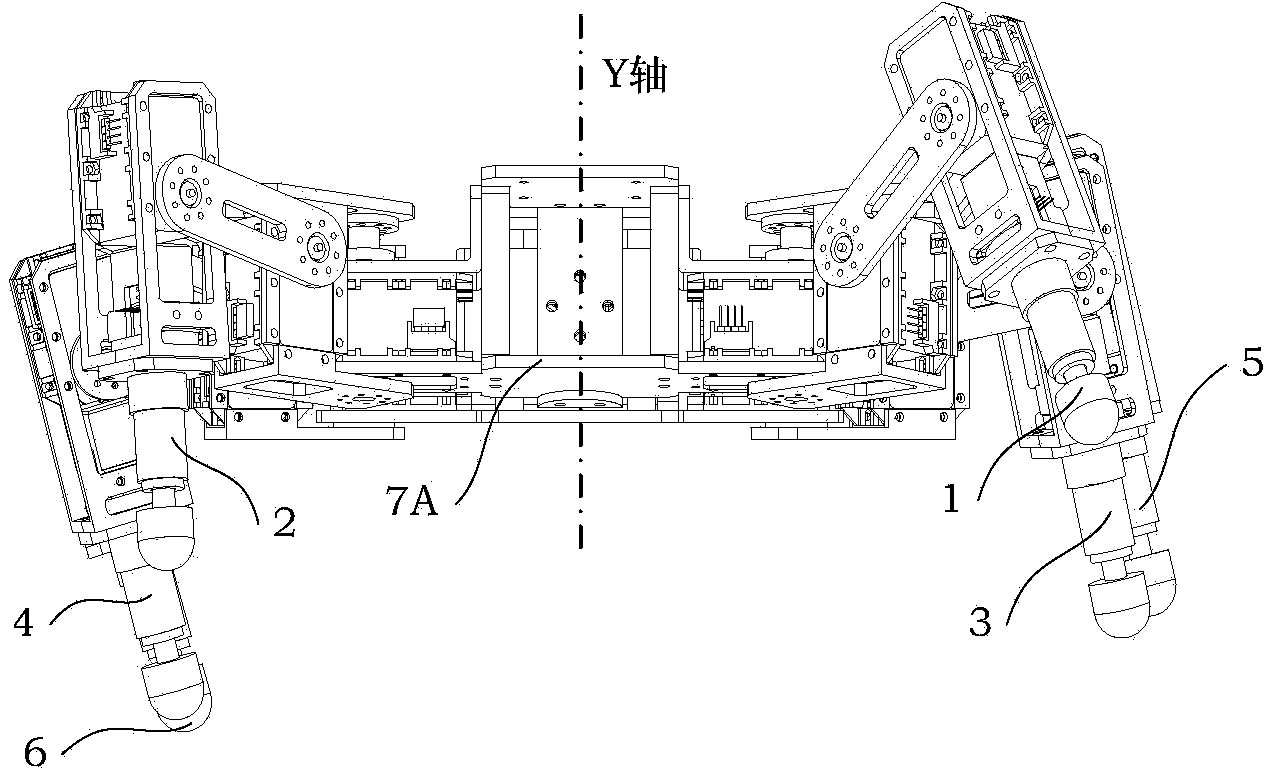
[0024] see figure 1 , Figure 1A , Figure 1B , Figure 4 As shown, six foot devices with the same structure designed by the present invention are installed on a torso body to form a hexapod walking robot with obstacle-surmounting ability. The hexapod walking robot with obstacle-surmounting ability includes left front leg 1, right front leg 2, left middle leg 3, right middle leg 4, left rear leg 5, right rear leg 6 and trunk body 7; the trunk body 7 consists of It consists of a front body 7A and a rear body 7B. Among them, the left front leg 1, the right front leg 2, the left middle leg 3, the right middle leg 4, the left rear leg 5 and the right rear leg 6 have the same structure; the left front leg 1 and the right front leg 2, the left middle leg 3 and the right middle leg 4 , The left rear leg 5 and the right rear leg 6 are arranged symmetrically with...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More