

Automatic guiding control method, device and system
An automatic guidance and control method technology, applied in two-dimensional position/channel control and other directions, can solve problems such as difficult control parameter setting, difficult to deal with input constraints and state constraints, and achieve the effect of eliminating deviations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
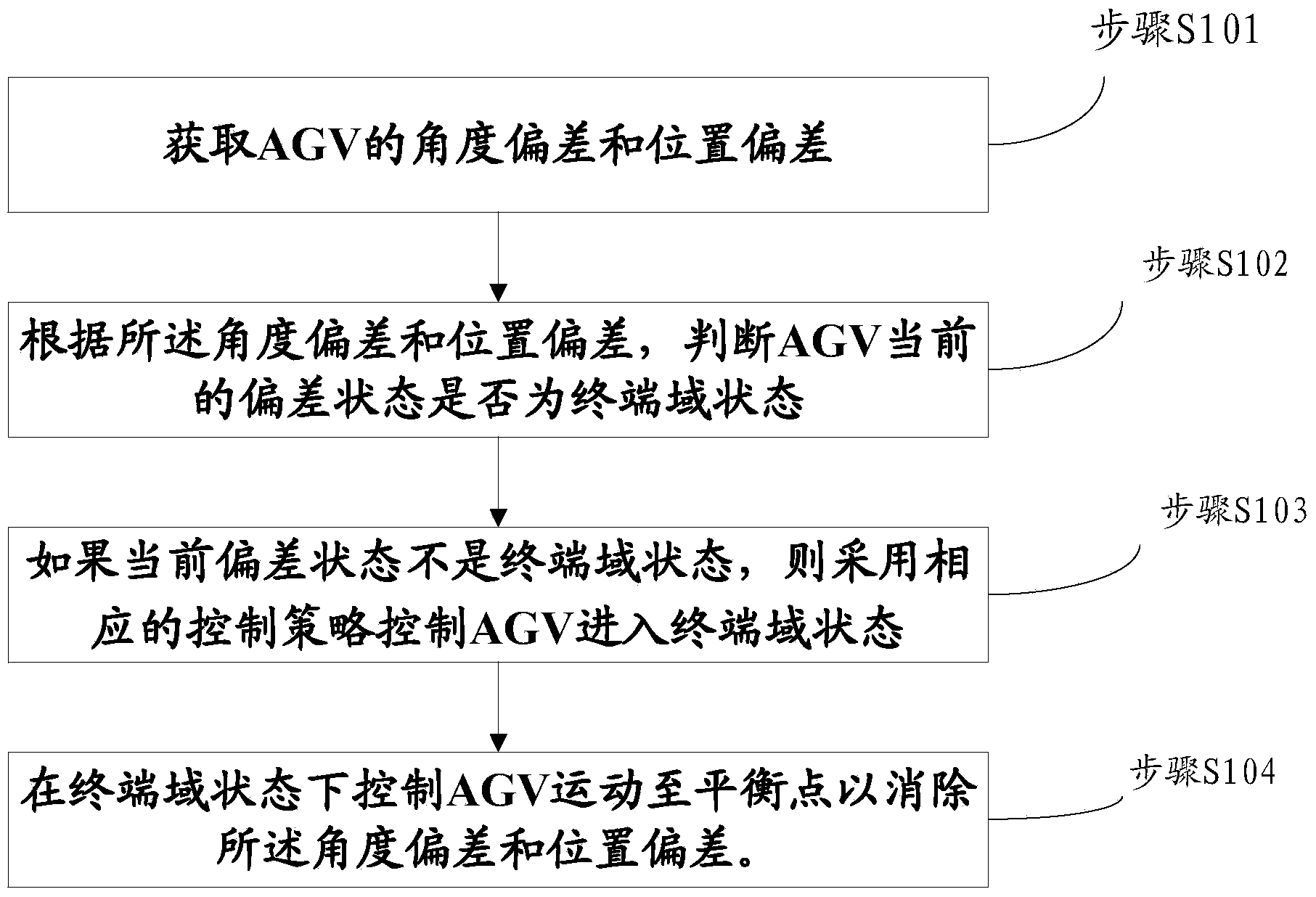
[0031] refer to figure 1 , the present embodiment provides an automatic guidance control method, including:
[0032] Step S101, obtaining the angle deviation and position deviation of the AGV;
[0033] Step S102, according to the angle deviation and the position deviation, it is judged whether the current deviation state of the AGV is a terminal domain state;
[0034] Step S103, if the current deviation state is not the terminal domain state, then adopt the corresponding control strategy to control the AGV to enter the terminal domain state;
[0035] Step S104, controlling the AGV to move to a balance point in the terminal domain state to eliminate the angle deviation and position deviation.
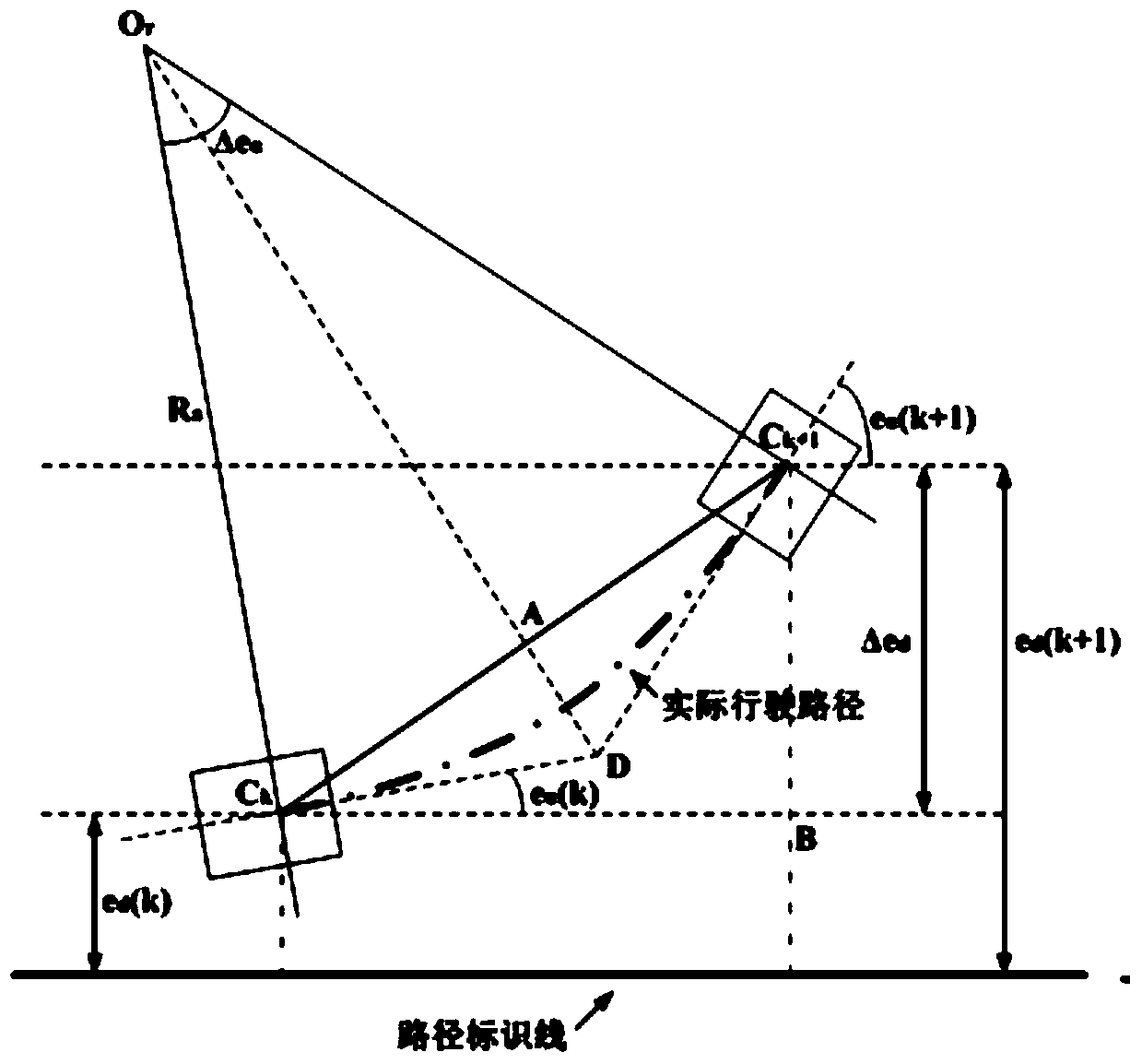
[0036] Execute step S101 to obtain the angle deviation and position deviation of the AGV. The angle deviation is the deviation between the AGV movement direction and the path marking line direction, and the position deviation is the vertical distance between the AVG reference center an...
Embodiment 2
[0253] refer to Figure 9 , this embodiment provides an automatic guidance control device, including:
[0254] Deviation acquisition module 301, used to acquire the angle deviation and position deviation of AGV;
[0255] State judging module 302, for judging whether the current deviation state of AGV is terminal domain state according to described angle deviation and position deviation;
[0256] State conversion module 303, for when the current deviation state of the AGV is not the terminal domain state, control adopts corresponding control strategy to control the AGV to enter the terminal domain state;
[0257] The deviation elimination module 304 is configured to control the AGV to drive toward the balance point in the terminal domain state so as to eliminate the angle deviation and position deviation.
[0258] As an optional implementation, the deviation acquisition module 301 is used to control and obtain the deviation between the AGV motion direction and the direction o...
Embodiment 3
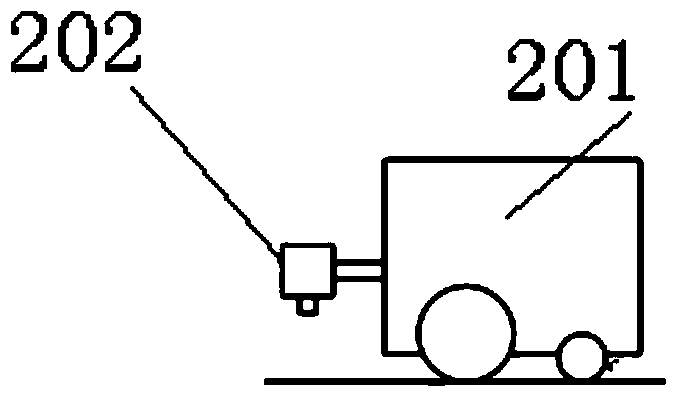
[0282] Such as Figure 10 As shown, the present embodiment provides an automatic guidance system, including:
[0283] The automatic guidance device 401 also includes an AGV 402 and a path marking line 403. The AGV is provided with a camera 404, and the camera 404 protrudes from the center line of the AGV 402 by a preset distance and is installed in front of the AGV 402.
[0284] The executive body of the automatic guidance control method in the present invention is the automatic guidance device 401; the automatic guidance control device 401 can be an independent equipment entity; or, the automatic guidance control device can be integrated in the AVG402 as a functional module ; In this regard, the embodiments of the present invention are not limited.
[0285] The automatic guidance system provided in this embodiment uses the angle deviation and position deviation of the AGV to calculate and plan the driving trajectory of the AVG for a period of time in the future to eliminate ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More