

Lambda* path planning algorithm
A path planning and algorithm technology, which is applied in two-dimensional position/channel control and other directions, can solve the problems of many nodes involved and time-consuming, etc., and achieve the effect of small path length, reducing time-consuming, and reducing the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0023] Embodiment 1: Algorithm when the present invention is implemented in planar path planning
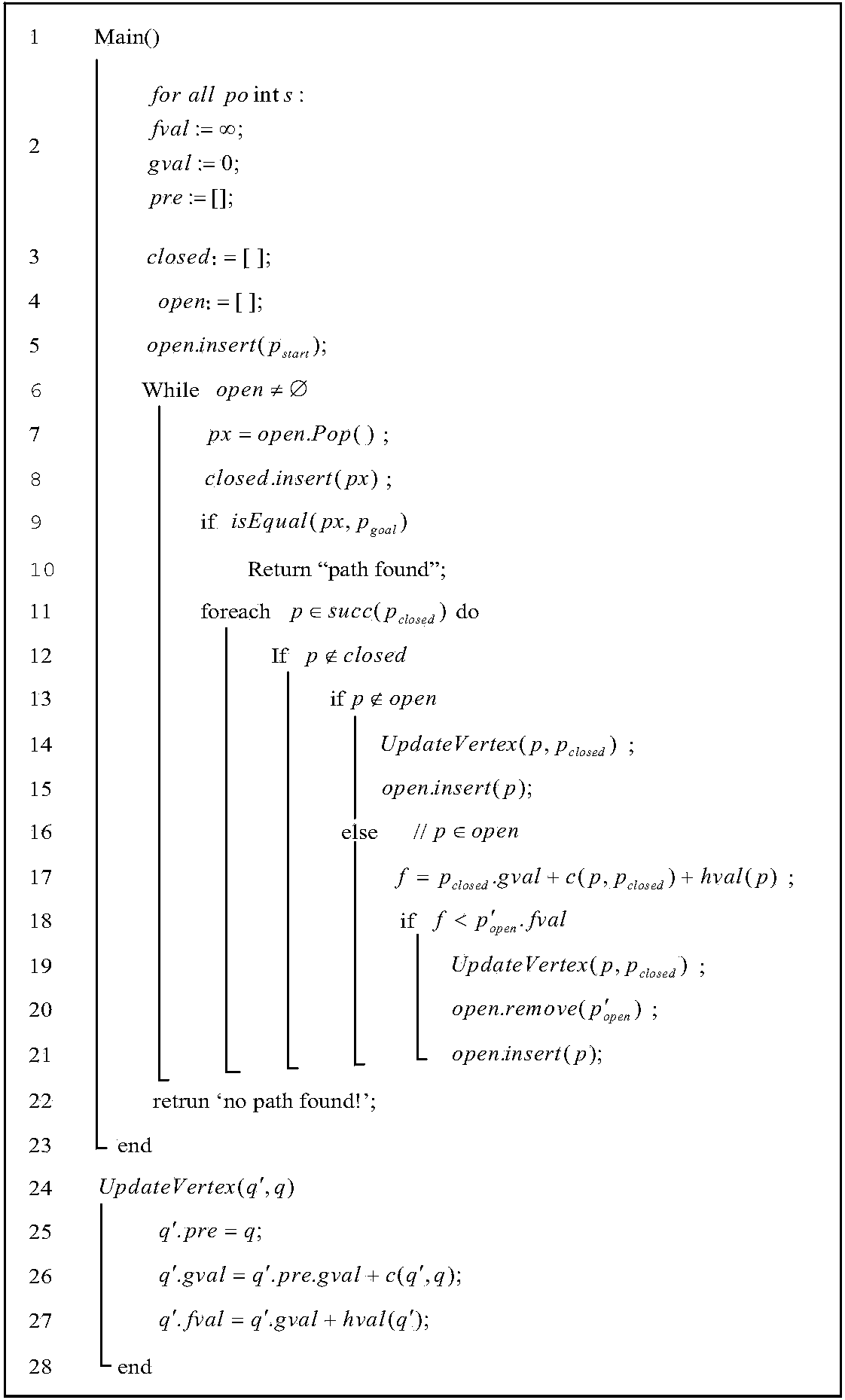
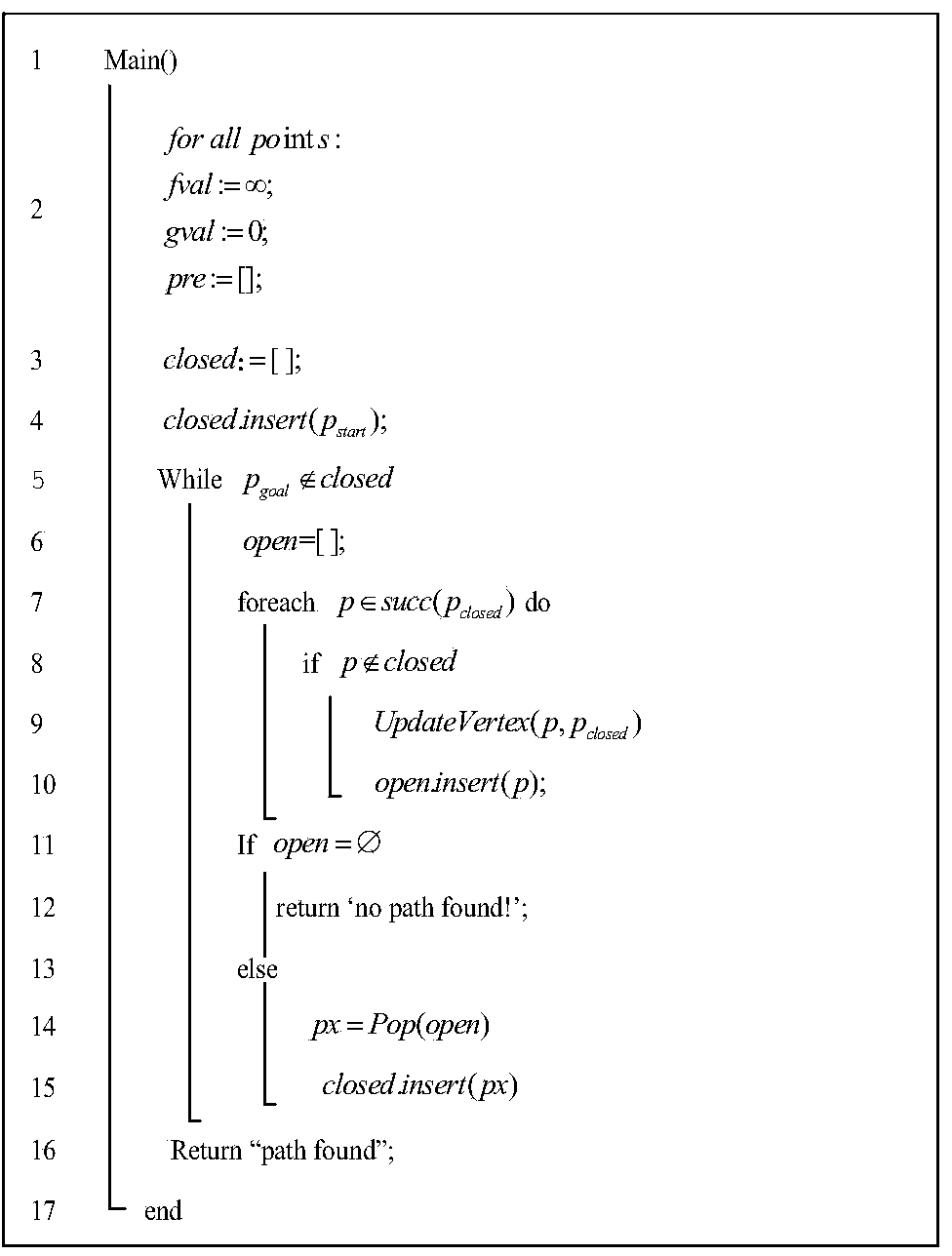
[0024] figure 2 Shown is the algorithm pseudo code when the present invention is implemented in planar path planning. Such as figure 2 As shown, the path planning algorithm in Embodiment 1 of the present invention includes:
[0025] 1. Generate an envelope according to the position and shape of the obstacle, and generate a path intermediate point set V. In Embodiment 1 of the present invention, a rectangular envelope is used, and the intermediate point of the path is the apex of the obstacle envelope;
[0026] ②Construct the intermediate data structure and create open and closed tables;
[0027] ③ will p start Insert closed table;
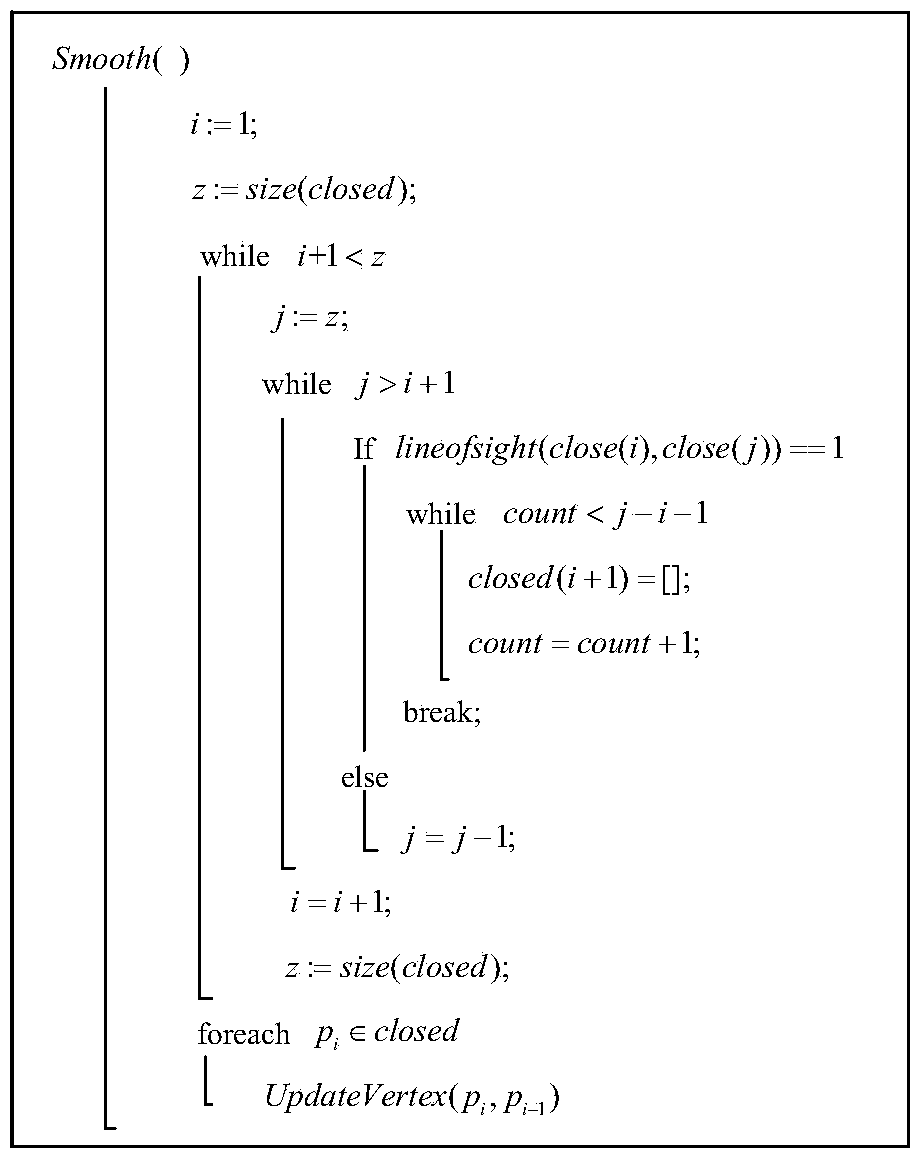
[0028] ④ when p goal If it is not in the closed table, then expand the node and turn to ⑤; otherwise, the smooth path (algorithm pseudocode such as image 3 shown), and output the path information;
[0029] ⑤ Use the node with the smallest f...
Embodiment 2
[0045] Embodiment 2, the present invention is implemented in the algorithm of path planning under 3D environment
[0046] Figure 4 Shown is the algorithm flow chart when the present invention is implemented in path planning in a 3D environment. Such as Figure 4 As shown, the path planning algorithm of Embodiment 2 of the present invention includes:
[0047] 1. Generate an envelope according to the position and shape of the obstacle, and generate a path intermediate point set V. In Embodiment 2 of the present invention, a cuboid envelope is used, and the path intermediate point is the apex of the obstacle envelope;
[0048] ②Construct the intermediate data structure and create open and closed tables;
[0049] ③ will p start Insert closed table;
[0050] ④ when p goal If it is not in the closed table, then expand the node and turn to ⑤; otherwise, the smooth path (algorithm pseudocode such as image 3 shown), and output the path information.
[0051] ⑤ Use the node wit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More