

Front car identification method based on monocular vision
A recognition method and monocular vision technology, applied in the field of intelligent transportation, can solve problems such as rear-end collision accidents
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
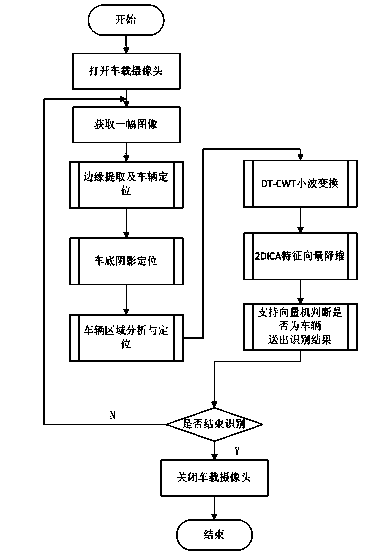
[0066] Create template databases for multiple vehicle types and non-vehicle types. Grayscale each vehicle image in the template library and normalize it to a 64×64 image with bilinear interpolation. Then use the filter coefficient as h 0 ,h 1 , g 0 , g 1 , h 0o ,h 1o Binary tree complex wavelet transform, filter the row and column of the image respectively, obtain the real part and imaginary part of the binary tree wavelet transform of the image, and calculate its amplitude, and form the image set of the binary tree complex wavelet transform of the image, After normalization and vectorization, it is used as the features of the template image. Use the two-dimensional independent component analysis method in step (4) to reduce the dimensionality of the feature sample set of the template library to obtain the feature with the maximum discrimination s is the vehicle area and non-vehicle area, i=1,2,...300 is the number of samples of each type of template library. The samp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More