

Series-parallel connection ball joint device
A ball joint and parallel technology, which is applied in the field of humanoid robots, can solve problems such as small working space, low precision, and complex mechanism, and achieve the effects of increasing stiffness and accuracy, improving power-to-volume ratio, and increasing motion space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
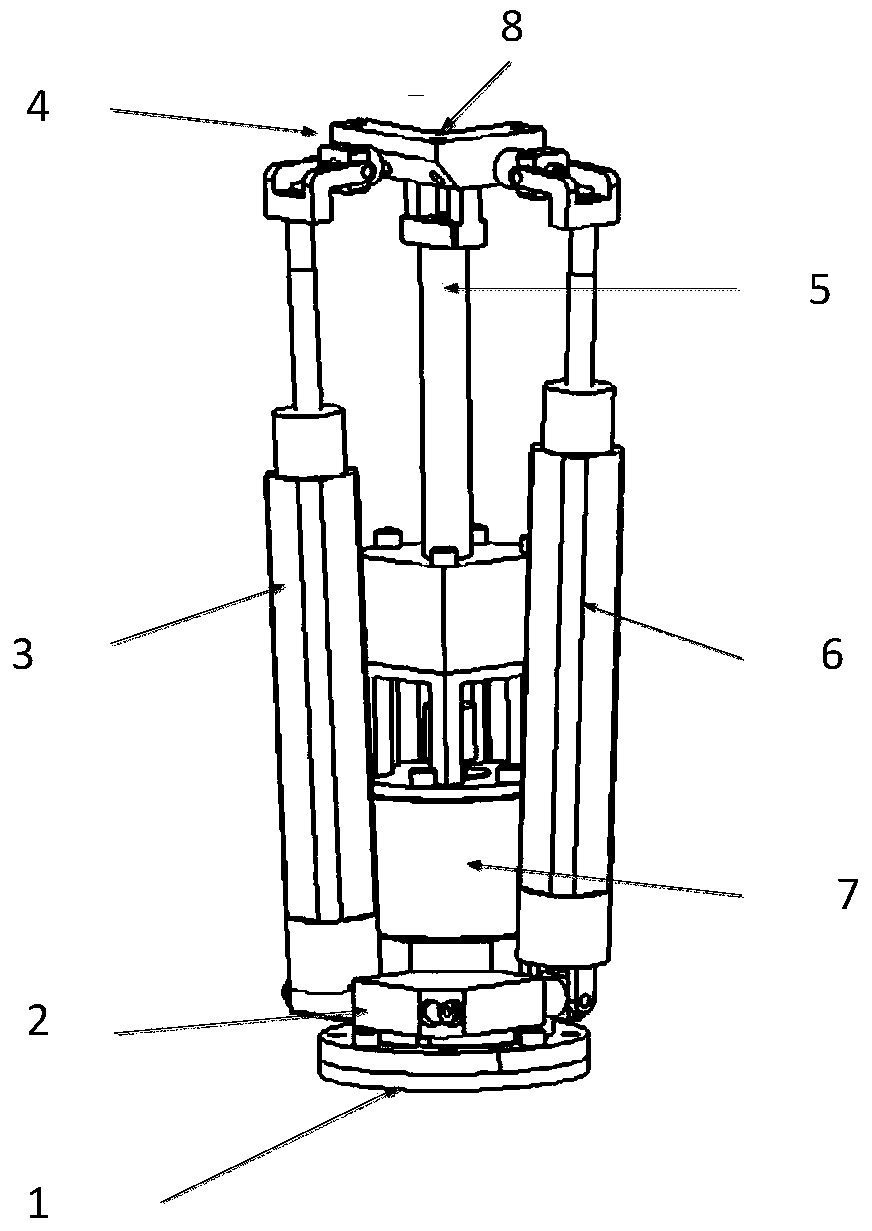
[0033] See figure 1As shown, a series-parallel ball joint device of the present invention is a three-degree-of-freedom mechanism that can be used as a humanoid arm shoulder and wrist, and consists of a joint base 1, a static platform 2, an X-axis branch chain 3, and a dynamic platform 4 , the support chain 5, the Y-axis branch chain 6 and the swing unit 7, the series-parallel ball joint device generates three degrees of freedom rotation around the center 8 of the ball. The ball joint base 1 and the static platform 2 are installed on the output end of the swing unit 7 and the mounting flange respectively. When the swing unit 7 moves, the static platform 2 and the ball joint base 1 will rotate relative to each other, forming the movement of the moving platform 4 around the platform 4. Z-axis rotation; X-axis branch chain 3 is connected between the stat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More