

Lateral active collision avoidance system and control method thereof
An active and horizontal technology, applied in control devices, input parameters of external conditions, transportation and packaging, etc., can solve problems such as side collisions and rear-end collisions that cannot be actively avoided, so as to reduce economic property losses, improve safety, and drive comfortably environmental effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in further detail below in conjunction with the accompanying drawings.
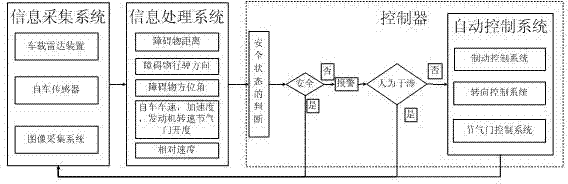
[0030] The basic principle of a lateral active collision avoidance system of the present invention is as follows: figure 1 shown.
[0031] The system includes a signal acquisition system, a signal processing system, and a controller.
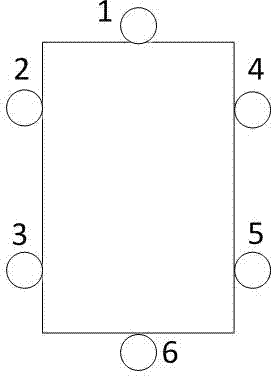
[0032] The signal acquisition system includes on-board radar devices (at least six), image acquisition system and self-vehicle sensors. The signal acquisition system mainly acquires road information and self-vehicle information. And transmit the collected signal to the signal processing system.
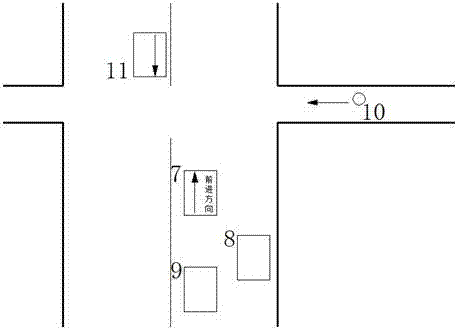
[0033] The signal processing system processes the road information and self-vehicle information obtained by the signal acquisition system, and obtains information such as the relative distance, speed, azimuth, and driving direction of the front object, left object, right object, and rear object, as well as the speed of the self-vehi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More