

Three-pillar support-type superstructure of unmanned surface vehicle
A superstructure, support technology, applied in superstructure, ship, ship construction and other directions, can solve the problems of lack of dynamic stability, anti-overturning sensing equipment sensing efficiency, difficulty in maintaining motion stability, and reduced ship navigation performance, etc. Achieve significant anti-overturning ability, reduce sway characteristics and improve longitudinal stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
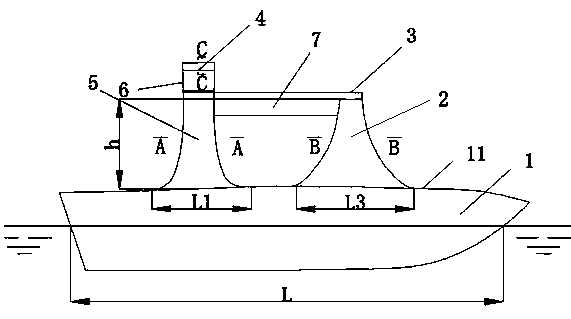
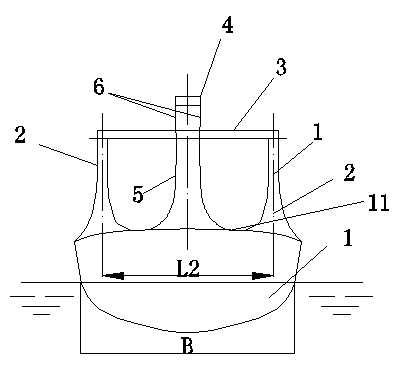
[0018] see Figure 1-3 , the surface unmanned vehicle includes the main hull 1, the design waterline length of the main hull 1 is L, and the design waterline width is B.
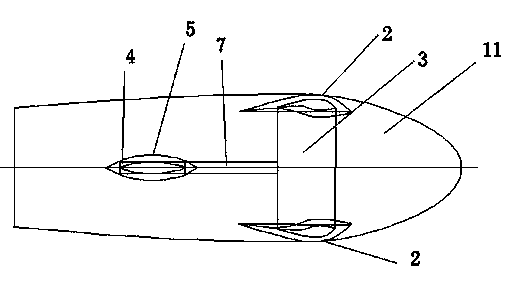
[0019] Two front pillars 2 and a rear pillar 5 are arranged on the deck 11 of the main hull 1, and the bottoms of the two front pillars 2 and a rear pillar 5 are all vertically fixed on the deck 11. Two front pillars 2 and a rear pillar 5 are fully enclosed pillar structures. Two front pillars 2 are symmetrical with respect to the left and right width direction of the main hull 1, and a rear pillar 5 is located in the middle of the main hull 1 in the left and right width direction.
[0020] The two front pillars 2 are located at the forward (1 / 6-1 / 4) L position of the midship, and the rear pillar 5 is located at the rear (1 / 6-1 / 4) L position of the midship. The bottom length L1 of the rear pillar 5 is (1 / 6-1 / 5) L, the height h of the rear pillar 5 is 2 / 3-13 / 7 of the design waterline length, the height of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More