

Automatic driving method and automatic driving system
An automatic driving and maneuvering technology, applied in data processing applications, forecasting, two-dimensional position/channel control, etc., can solve problems such as the inability to accurately plan the path and trajectory of motor vehicles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
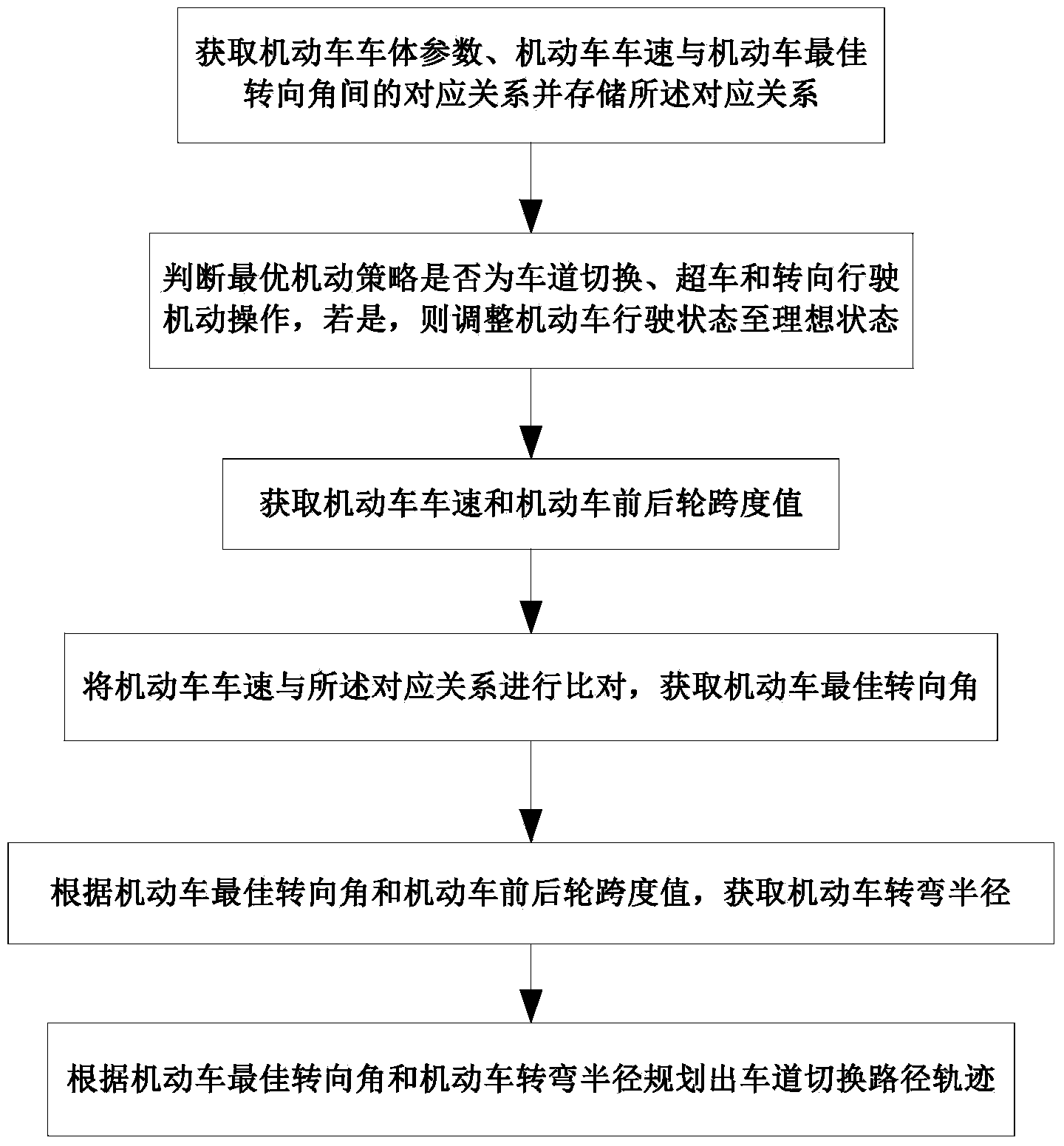
[0084] This embodiment provides an automatic driving method, such as figure 1 shown, including the following steps:
[0085] Obtaining the corresponding relationship between the vehicle body parameters, the vehicle speed and the optimal steering angle of the vehicle and storing the corresponding relationship.
[0086] Determine whether the optimal maneuvering strategy is lane switching, overtaking and steering maneuvers, and if so, adjust the driving state of the motor vehicle to the ideal state.
[0087] Obtain the vehicle speed and the wheelbase of the front and rear wheels of the vehicle.
[0088] The speed of the motor vehicle is compared with the corresponding relationship to obtain the optimal steering angle of the motor vehicle.
[0089] According to the optimal steering angle of the motor vehicle and the wheelbase of the front and rear wheels of the motor vehicle, the turning radius of the motor vehicle is obtained.
[0090] According to the optimal steering angle o...
Embodiment 2
[0115] On the basis of Embodiment 1, the automatic driving method provided in this embodiment further includes the following steps:
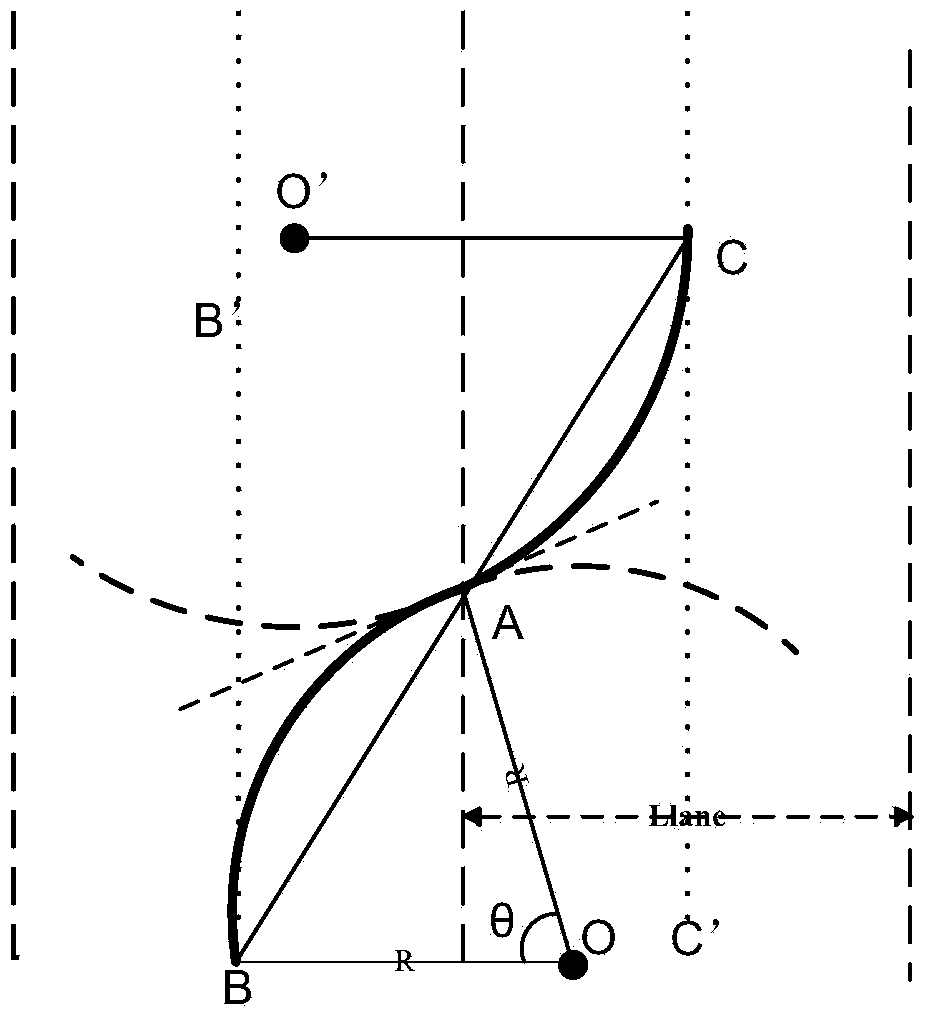
[0116] A maneuvering operation command is generated to control the motor vehicle to perform lane switching, overtaking and steering maneuvering operations according to the lane switching path trajectory.
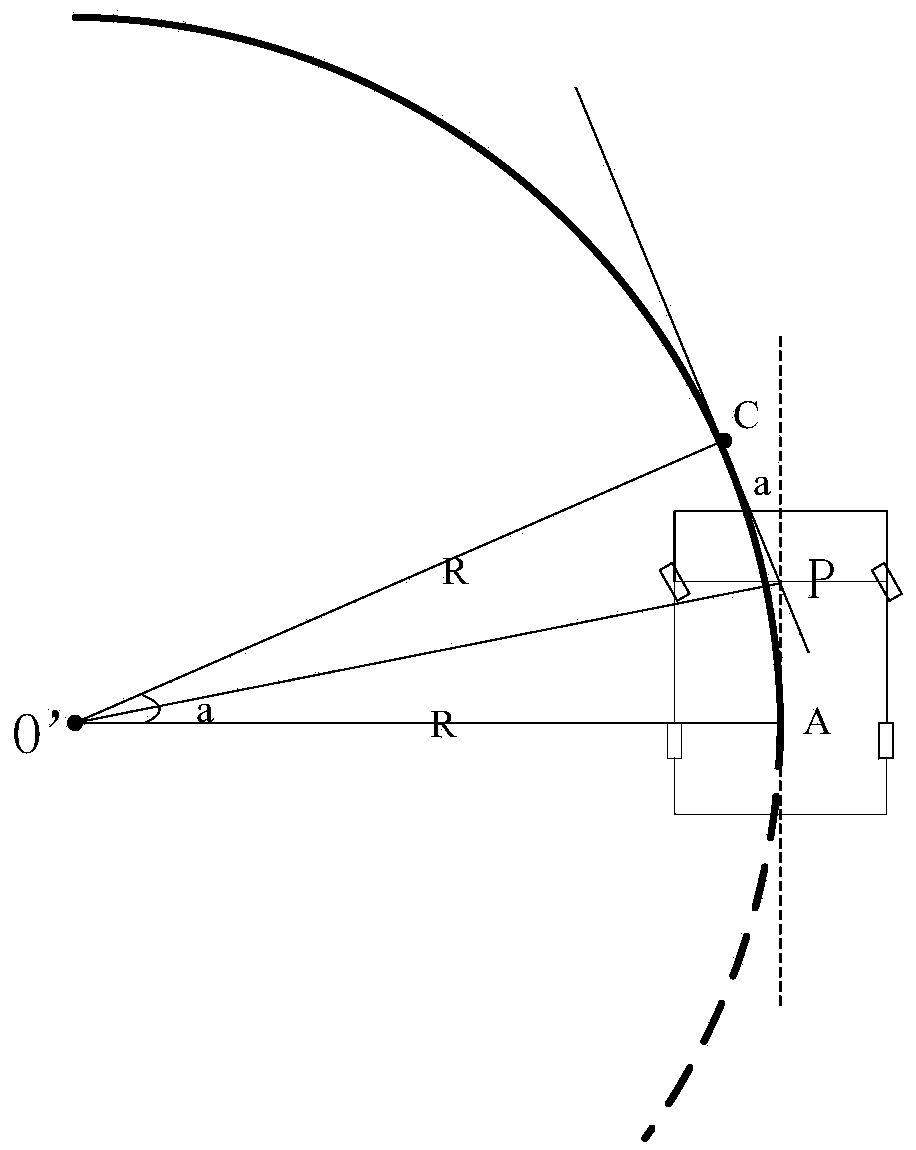
[0117] Such as figure 2 As shown, if the motor vehicle wants to switch from the left lane to the right lane, during the actual automatic driving process of the motor vehicle, the turn signal of the motor vehicle needs to be turned on, and the front wheel of the motor vehicle is first shifted to the right by α through the maneuver operation command Angle, calculated from this point in time, when the driving distance of the motor vehicle is πRα / 180, that is, when the motor vehicle travels along the arc BA to point A, adjust the front wheel of the motor vehicle to shift to the left by an angle of 2α, and calculate from this point in time, When ...
Embodiment 3
[0128] This embodiment provides an automatic driving system, such as Figure 6 shown, including:
[0129] Correspondence storage module 1 is used to obtain and store the correspondence between vehicle body parameters, vehicle speed and optimum steering angle of the vehicle.
[0130] The driving maneuver control module 2 is used to adjust the driving state of the motor vehicle, and adjust the driving state of the motor vehicle to an ideal state when the optimal maneuvering strategy is lane switching, overtaking and steering maneuvers.
[0131] The vehicle body information collection module 3 is used to collect the running state information of the motor vehicle, and the running state information of the motor vehicle includes the speed information of the motor vehicle and the wheelbase of the front and rear wheels of the motor vehicle.
[0132] The central processing control module 4 includes a path trajectory generation unit 41 .
[0133] The path trajectory generation unit 41...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More