

Self-adaptive active steering control method capable of improving handling stability of tractor-trailer
A technology of handling stability and active steering, applied in control devices, vehicle components, driver input parameters, etc., can solve the problems of heavy driver burden, operation rollover accidents, and difficulty in returning to normal, and achieve good robust performance. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0008] The present invention will be further described below in conjunction with accompanying drawing:
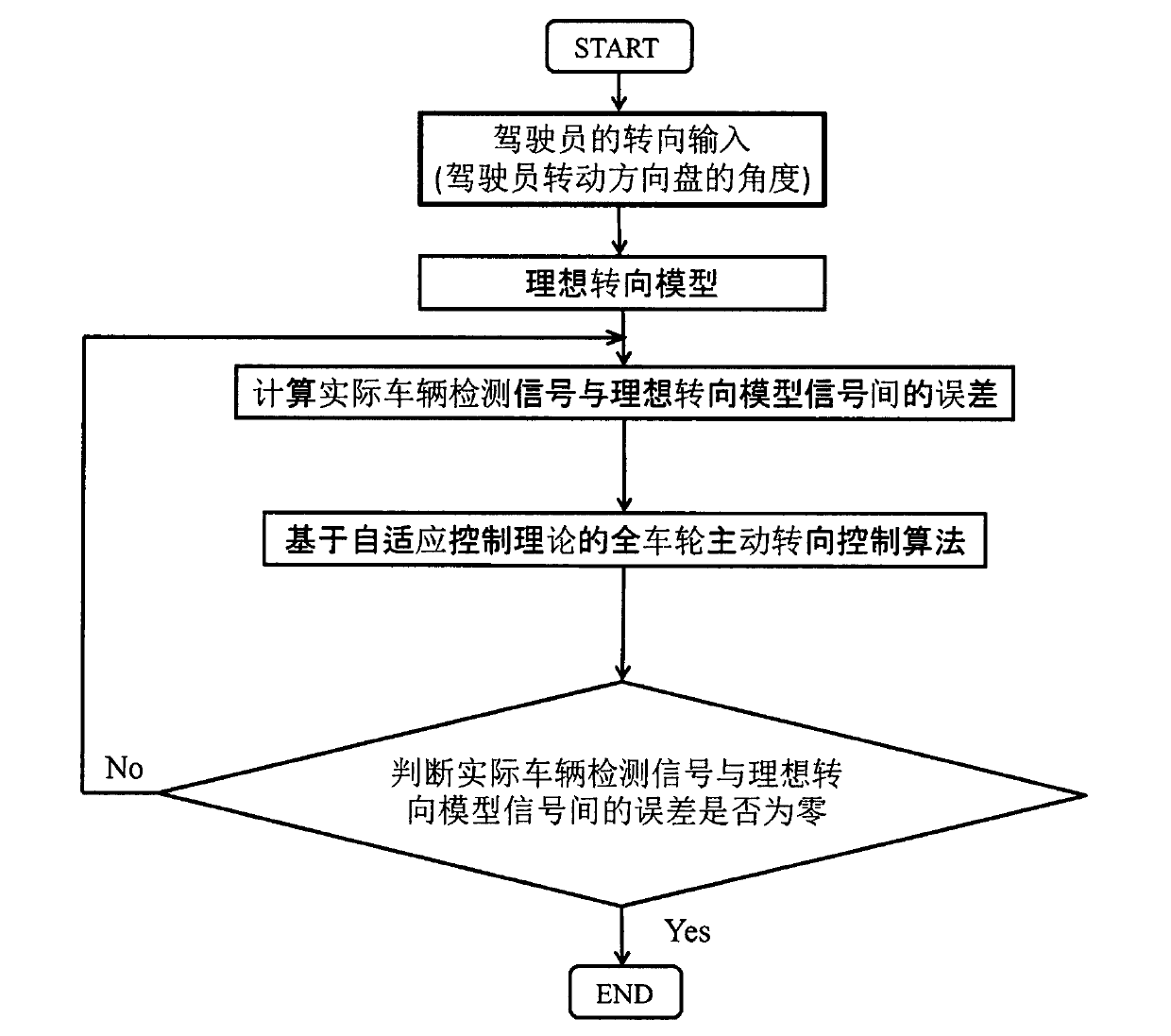
[0009] figure 1 It is a flowchart of an embodiment of the present invention, because the first and second steps of the present invention are pre-characteristic analysis and model design, so they are not shown in the figure, figure 1 Mainly explain the process of the third step in detail: (1) take the angle of the driver's steering wheel as the initial input after starting; (2) compare the input with the ideal steering model; (3) calculate the actual vehicle detection signal and the ideal The error between the steering model signals; (4) Apply the all-wheel active steering control algorithm based on the adaptive control theory; (5) Determine whether the error between the actual vehicle detection signal and the ideal steering model signal is zero, if it is zero, then end, If it is not zero, put the error signal into the designed adaptive steering controller, calculate the st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More