

A symmetrical multi-degree-of-freedom four-wheel all-wheel-drive walking excavator walking chassis
A technology with a degree of freedom and symmetry, which is applied to earth movers/shovels, motor vehicles, fluid steering mechanisms, etc., can solve problems such as high manufacturing process requirements, reduced overall efficiency, and single functionality, and achieve self-sustainability in the field High, large swing range up and down, the effect of increasing oil storage capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be further described below in conjunction with accompanying drawing.
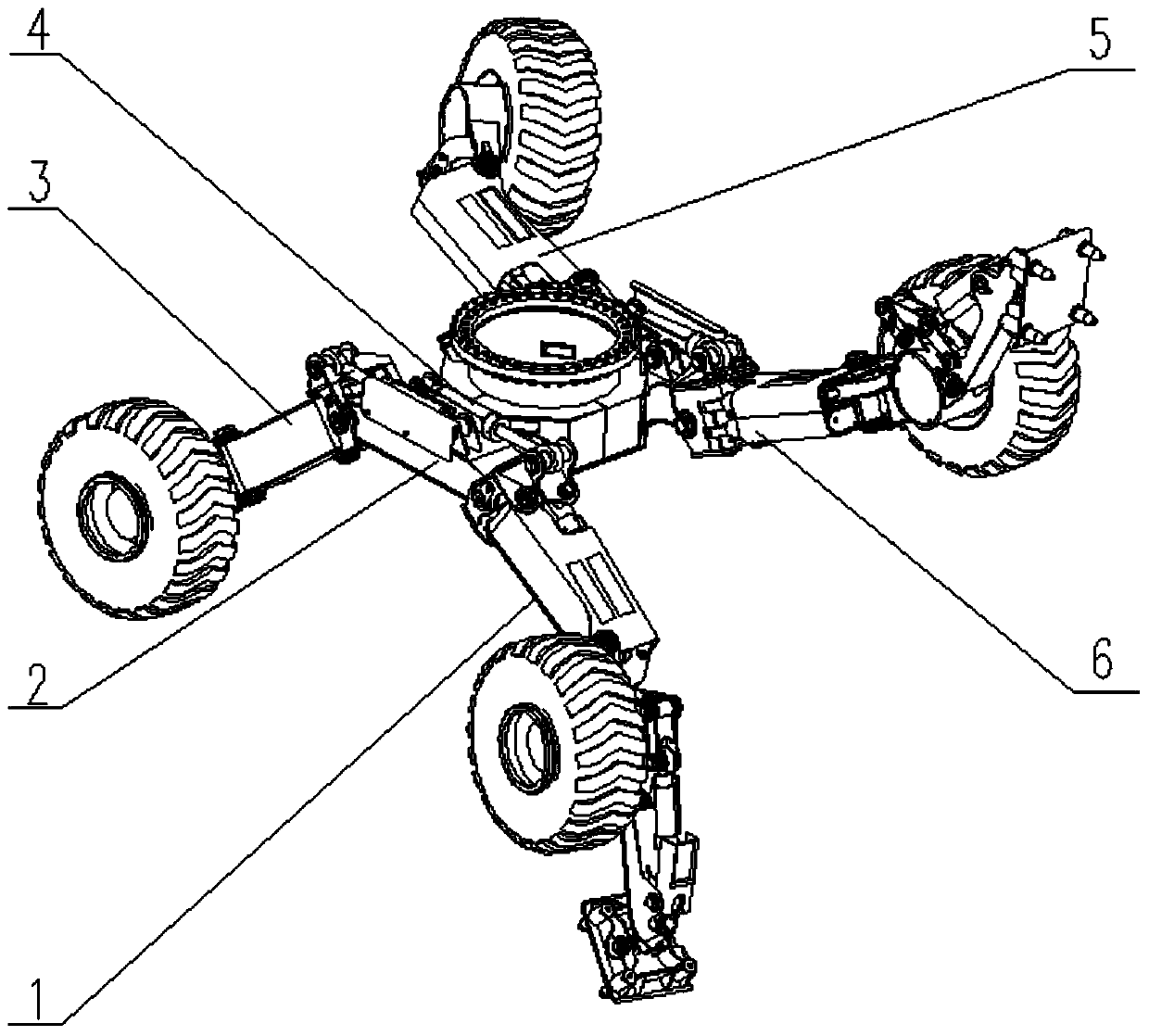
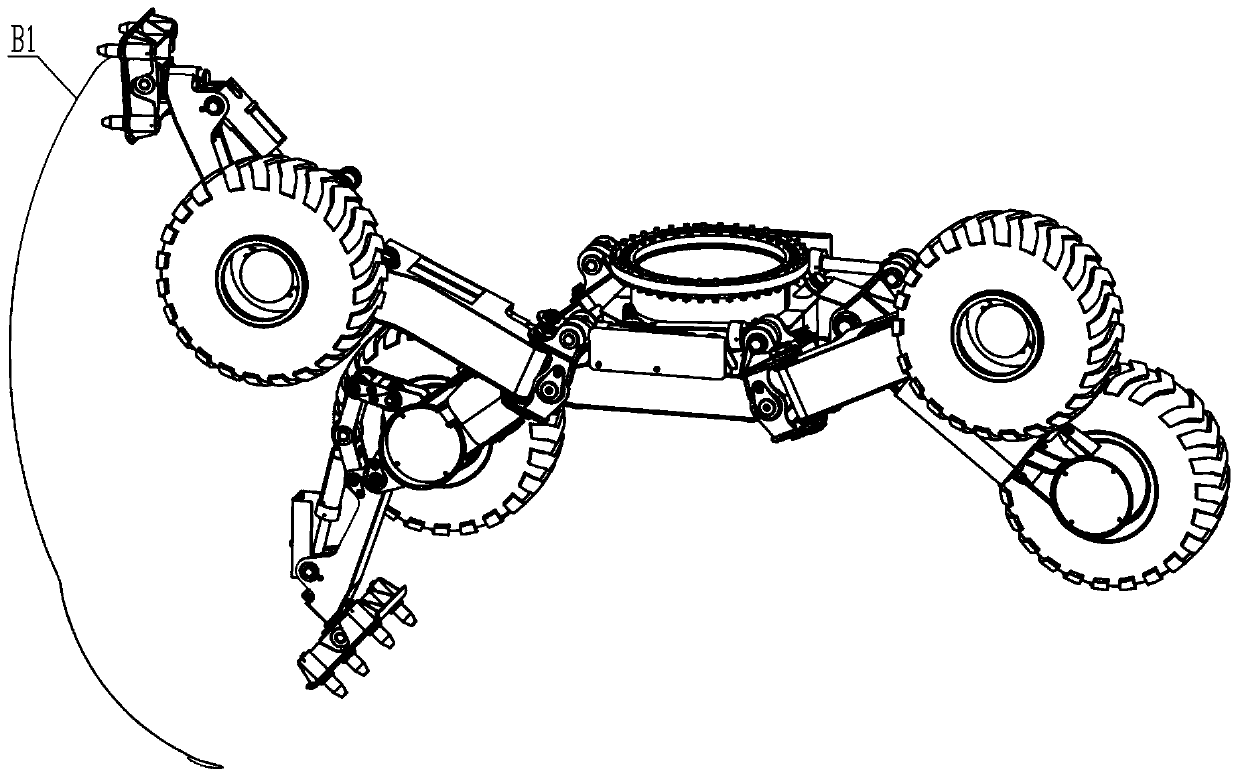
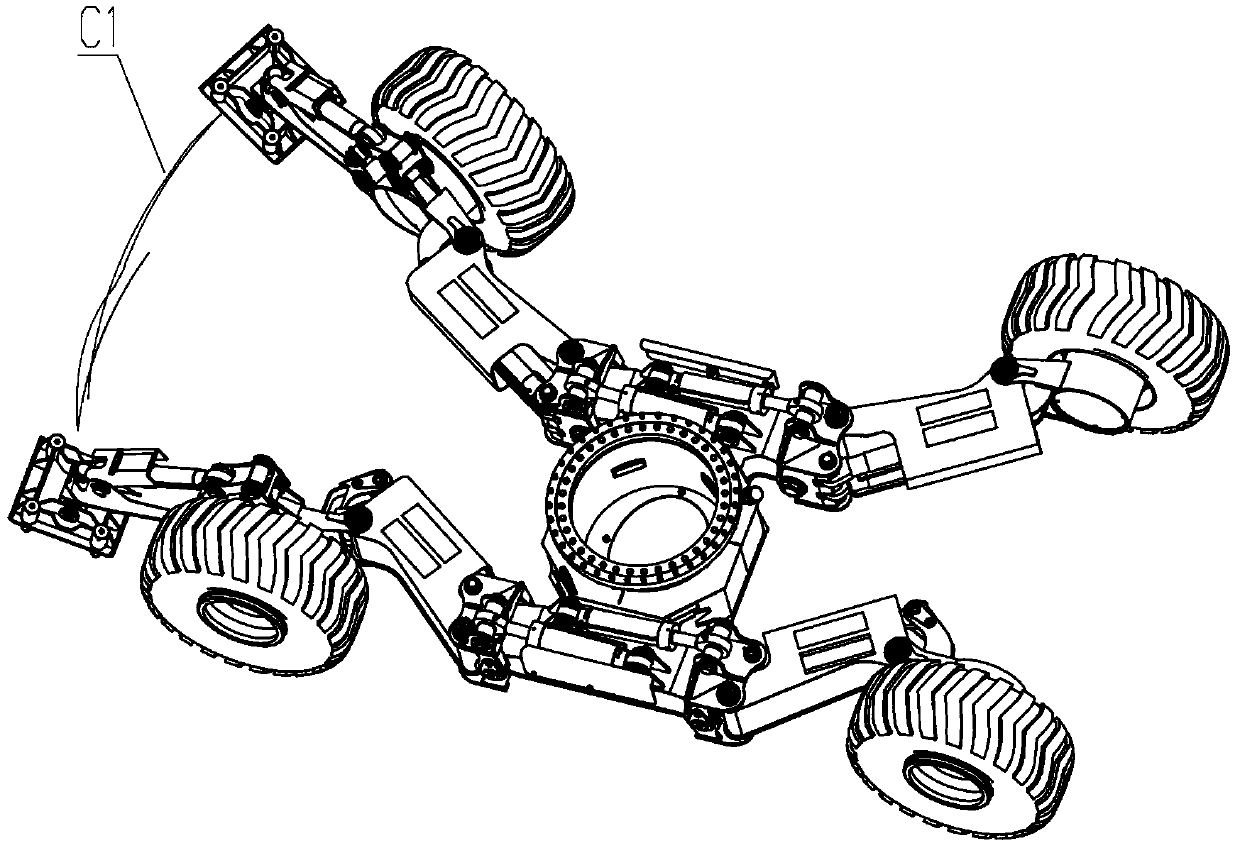
[0059] Such as Figure 1 to Figure 7 As shown, the walking chassis of the symmetrical multi-degree-of-freedom four-wheel full-drive walking excavator includes a right front leg 1, a slewing base 2, a right rear leg 3, a lifting cylinder 4, a left front leg 6, and a left rear leg 5. The leg 1 is structurally symmetrical with the left front leg 6, and the right rear leg 3 is structurally symmetrical with the left rear leg 5; the left front leg 6 has a set of front paw adjustment mechanism 6-14 more than the left rear leg 5; The base 2 is a symmetrical structure, consisting of a central oil tank and two side tanks arranged vertically on both sides of the central oil tank in a stepped manner. The central oil tank consists of a bottom plate 2-6, a seat ring 2-15, and two upper covers A2-22 and two surrounding boards 2-5 are surrounded; the seat ring 2-15 and the two surrounding...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More