

Trackless positioning navigation method and device
A technology of positioning, navigation and heading, applied in the field of autonomous motion control of robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
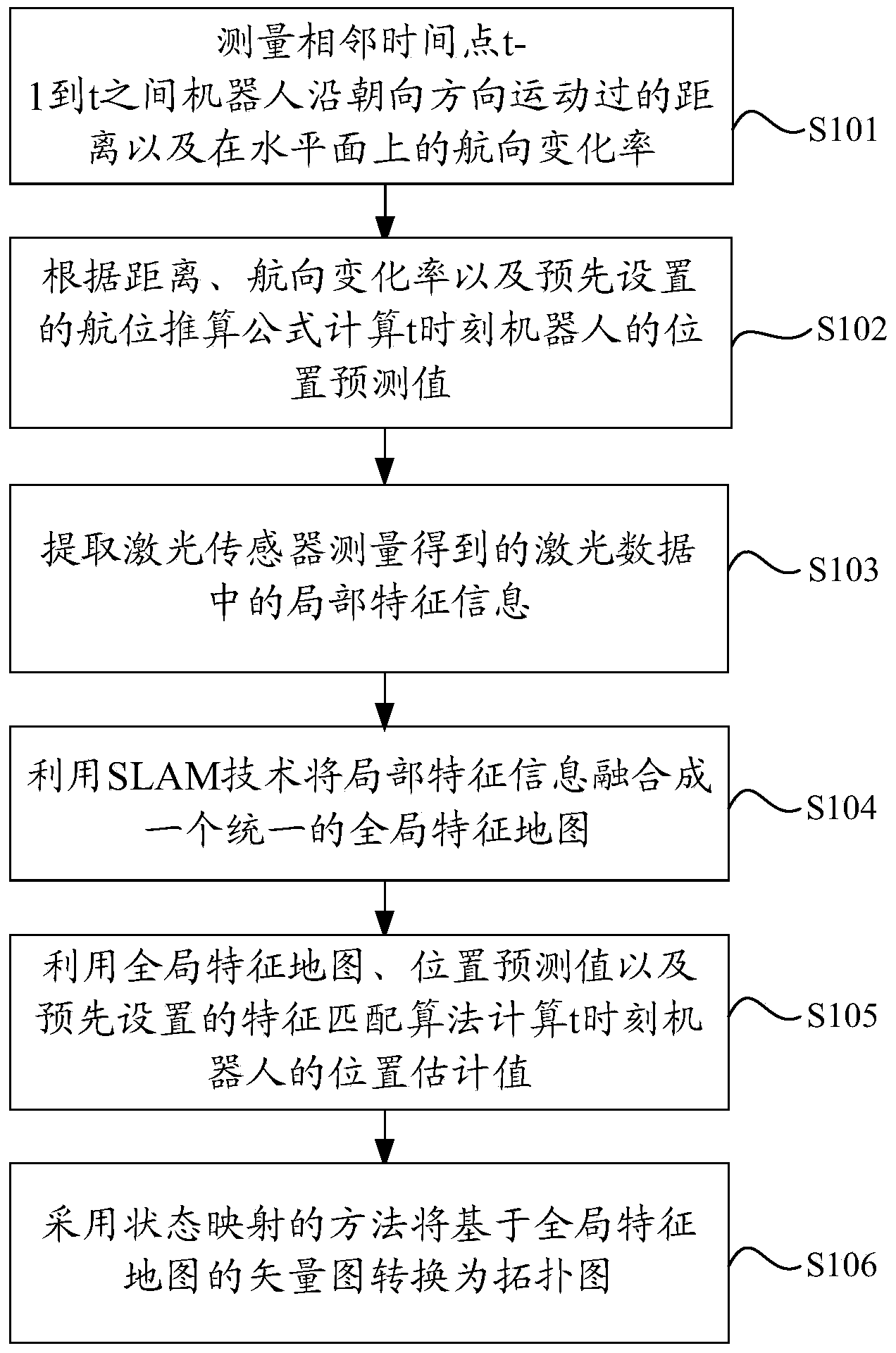
[0052] figure 1 It is a flow chart of a trackless positioning and navigation method provided in Embodiment 1 of the present application.
[0053] like figure 1 As shown, the method includes:
[0054] S101. Measure the distance moved by the robot along the heading direction and the heading change rate on the horizontal plane between adjacent time points t-1 and t.
[0055]In the embodiment of this application, the odometer is used to measure the distance that the robot has moved in the heading direction between adjacent time points t-1 and t, and the heading of the robot on the horizontal plane is measured by an IMU (Inertial Measurement Unit) rate of change.
[0056] S102. Calculate a predicted position value of the robot at time t according to the distance, the heading change rate, and a preset dead reckoning formula.
[0057] In this embodiment of the application, the distance that the robot has moved along the heading direction between the adjacent time points t-1 and t...
Embodiment 2
[0088] Figure 5 It is a schematic structural diagram of a trackless positioning and navigation device provided in Embodiment 2 of the present application.
[0089] like Figure 5 As shown, the device includes: a measurement unit 1, a position prediction unit 2, a local feature information extraction unit 3, a global feature map generation unit 4, a position estimation unit 5, and a topology map generation unit 6, wherein,
[0090] The measuring unit 1 is used to measure the distance moved by the robot along the heading direction and the heading change rate on the horizontal plane between adjacent time points t−1 and t.
[0091] The position prediction unit 2 is connected with the measurement unit 1 and is used to calculate the predicted position value of the robot at time t according to the distance, the heading change rate and a preset dead reckoning formula.
[0092] The local feature information extraction unit 3 is used to extract local feature information in the laser da...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More