

Method and system for splicing images of unmanned aircrafts in real time
An unmanned aerial vehicle and real-time image technology, applied in the field of image processing, can solve the problems of poor real-time image stitching and obvious stitching traces, and achieve excellent real-time performance, good stitching effect, and the effect of eliminating stitching lines
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The technical scheme of the present invention is described in detail below in conjunction with accompanying drawing:
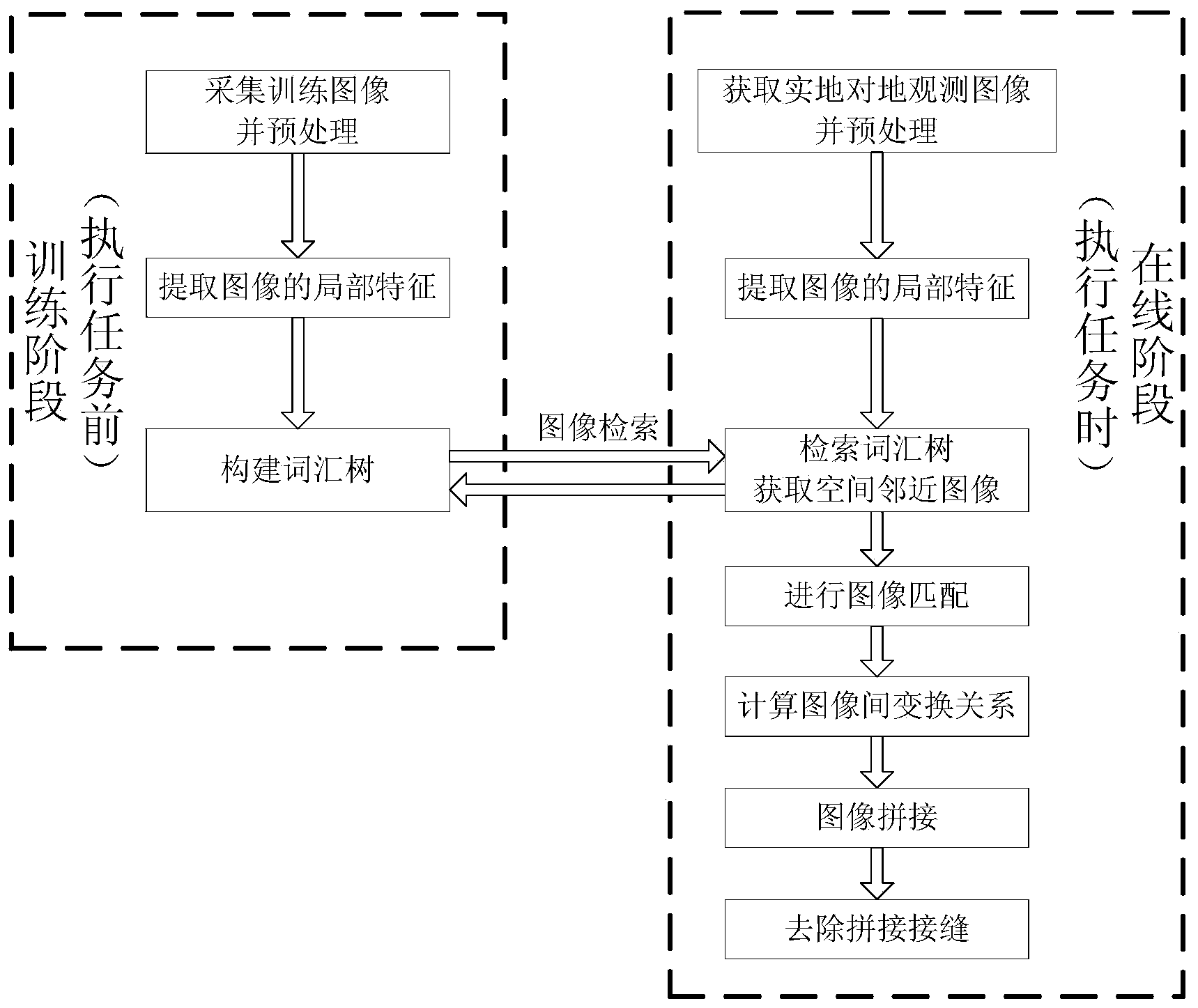
[0062] Such as figure 1 As shown, the present invention discloses a real-time image mosaic method and system of an unmanned aerial vehicle. The method includes two stages: the training stage, that is, before the unmanned aerial vehicle performs a task, the training image is collected and the local features of the training image are extracted, and a vocabulary tree is constructed. ;
[0063] training phase
[0064] Before the unmanned aerial vehicle performs the task, collect the training image and extract the local features of the training image, and construct the vocabulary tree; the process only needs to be carried out once, and the constructed vocabulary tree can be used in different tasks; it is realized by the following steps:
[0065] 1. Collect training images and preprocess them
[0066] Collect training images and extract training image inte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More