

Control method, control device, control system and sweeping vehicle for road edge cleaning
A cleaning device and control method technology, applied in road cleaning, cleaning methods, construction, etc., can solve problems such as collisions, cleaning devices deviating from the cleaning area, and no better solution, so as to improve work efficiency, reduce work difficulty, The effect of collision avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
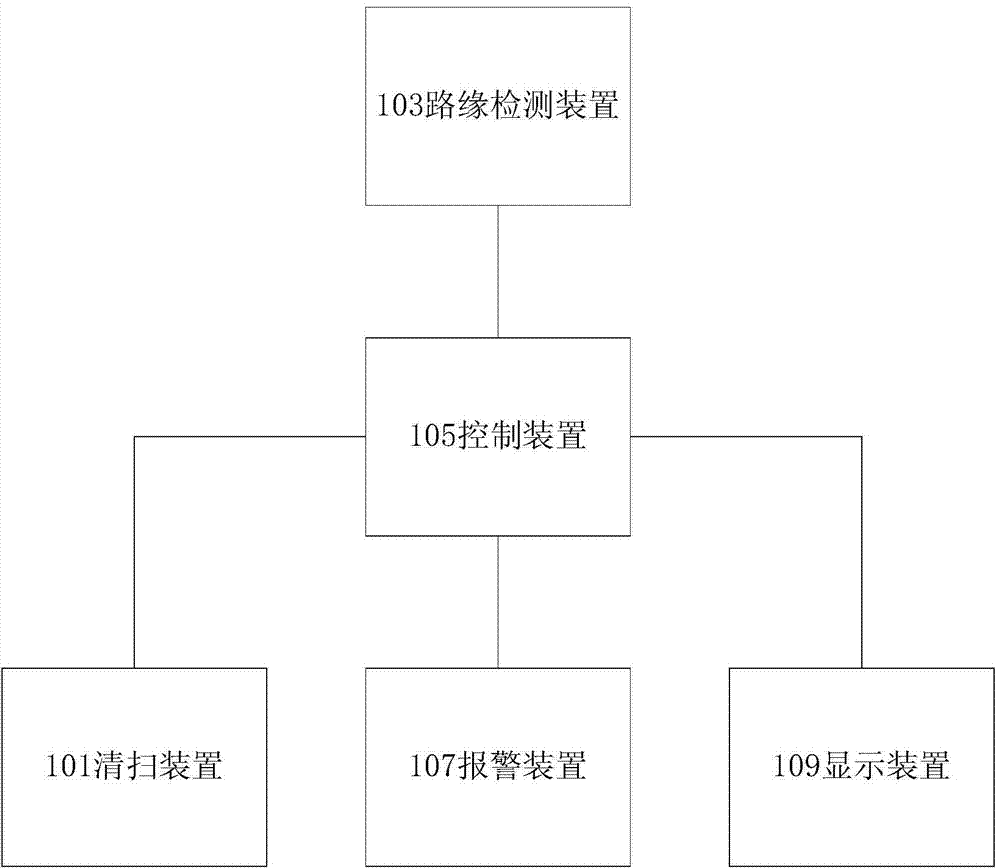
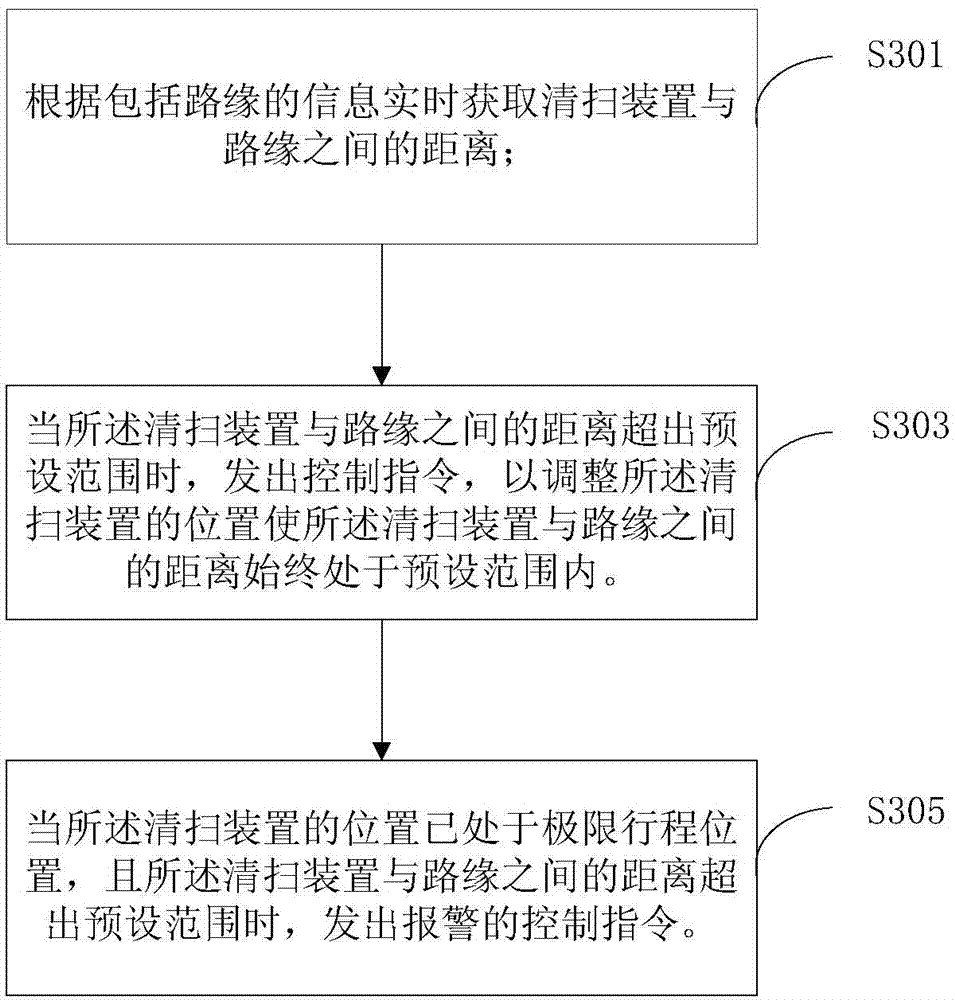
[0020] Embodiment 1, the curb detection device may be an image acquisition device installed on the side of the cleaning device, and the curb detection device may be used for real-time detection of images including the curb. After the control device receives the image including the curb, the edge detection method can be used to obtain the straight lines of all the edges in the image (the specific processing method can use the light intensity to identify the edge in the image, and of course other methods can also be used. Existing edge detection processing methods). Then use the prior information of the curb to determine the straight line of the curb in the straight line of the edge, wherein the prior information of the curb specifically includes the actual distance on both sides of the curb, the slope range of the straight line of the curb relative to the cleaning device, etc. , the specific prior information of the curb can be obtained according to the summary of the experimen...
Embodiment 2
[0021] Embodiment 2, the curb detection device can be a laser sensor or other length sensor, installed on the side of the cleaning device, and can preset a certain radiation angle range (the radiation angle range needs to cover the curb), used to obtain the All linear distance information from the curb detection device to the ground surface including the curb. Such as Figure 4 As shown, b0 to bn are straight lines from the curb detection device to the ground surface including the curb within the radiation range. It can be seen from the figure that starting from a straight line perpendicular to the ground surface, the straight-line distance from the curb detection device to the ground surface gradually increases until it meets the side of the curb, and the distance from the curb detection device to the ground surface The straight-line distance gradually decreases, and then the straight-line distance increases again after ending on the curb along the side. According to the ch...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More