

Fuzzy neural network control method for omni-directional intelligent wheelchair to avoid obstacle
A fuzzy neural network and wheelchair technology, which is applied in the field of omni-directional intelligent wheelchair obstacle avoidance based on state control variables, can solve problems such as prone to collisions and wheelchair travel paths deviating from users
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0075] The present invention will be described in detail below in conjunction with the accompanying drawings.
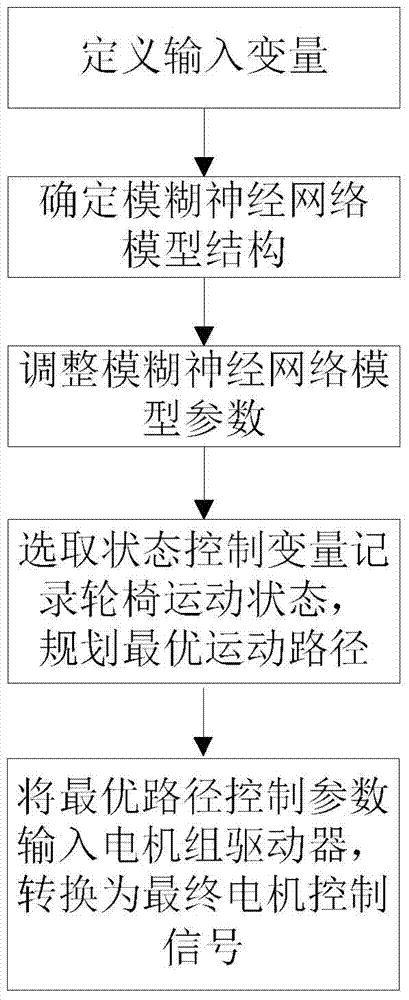
[0076] Step 1, define input variables.
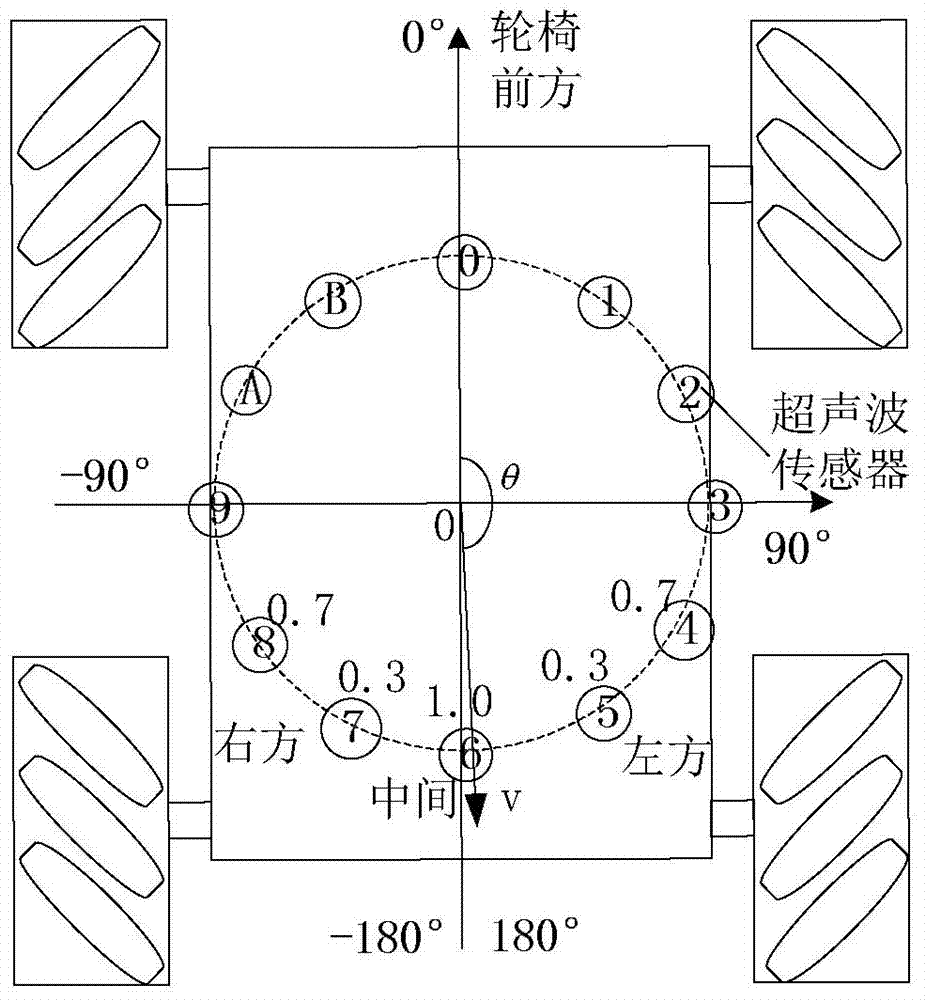
[0077] The fuzzy logic control method is similar to how people understand things, mainly including three processes of fuzzification, fuzzy reasoning and defuzzification. In order to achieve the purpose of collision-free passage of smart wheelchairs, the present invention collects obstacle distance information around smart wheelchairs through ultrasonic sensors, and classifies obstacle distance information. In the designed fuzzy neural network, five input variables d are defined l , d f , d r , θ, v, respectively represent the distance information of the left, middle and right obstacles, the direction angle of the wheelchair and the speed of the wheelchair.
[0078] Such as figure 2 As shown, when the wheelchair motion direction is -60°~60°, the information collected by No. 0 ultrasonic sensor is used as the front informat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More