

A control system and control method for the movement of a manipulator for inspection of container welds
A motion control and control method technology, applied in the directions of manipulators, welding equipment, manufacturing tools, etc., can solve the problems of high cost, economic loss, and unfavorable independent and rapid development of industries, and achieve the goal of saving resources, low inspection costs, and reducing maintenance costs. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0028] Specific implementation mode 1: The motion control system of the inspection machine in this implementation mode includes:
[0029] The inspection machine motion control system is composed of human-computer interaction subsystem, power management subsystem, motion control subsystem and manipulator subsystem;
[0030] Wherein, the power management subsystem supplies power to the human-computer interaction subsystem and the motion control subsystem, and the motion control subsystem is connected to the manipulator subsystem through a special cable integrated with a dedicated power line, data line, and control signal line. The system includes a manipulator, and the manipulator transmits the data of the motor resolver feedback to the motion control subsystem through the data line, and the motion control subsystem transmits the current corresponding to the rotation angle to the motor in the manipulator through the control signal line; the movement The control subsystem is conn...
specific Embodiment approach 2
[0049] Embodiment 2: This embodiment is different from Embodiment 1 in that: a control method for the movement of a large-scale high-risk container weld inspection manipulator includes the following content:
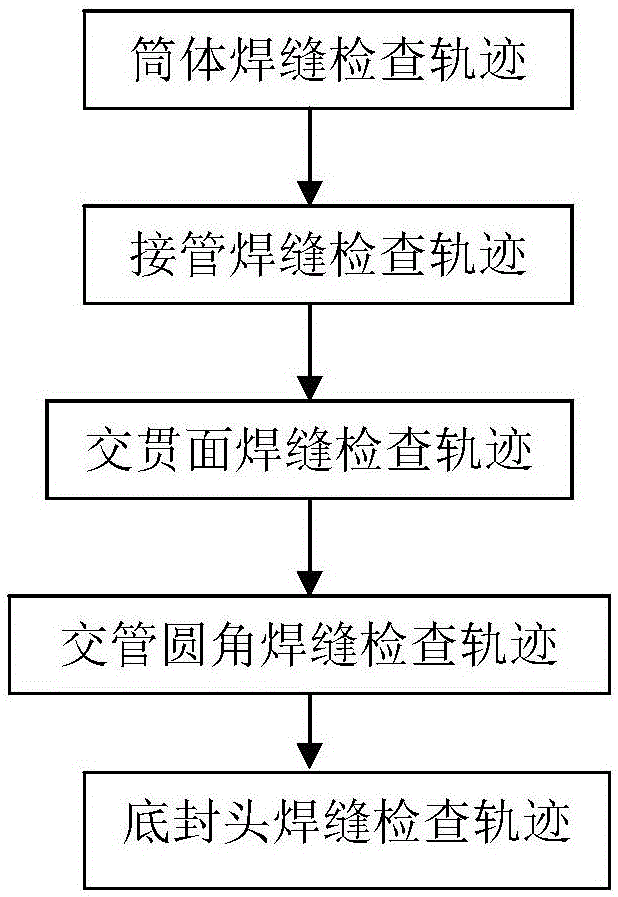
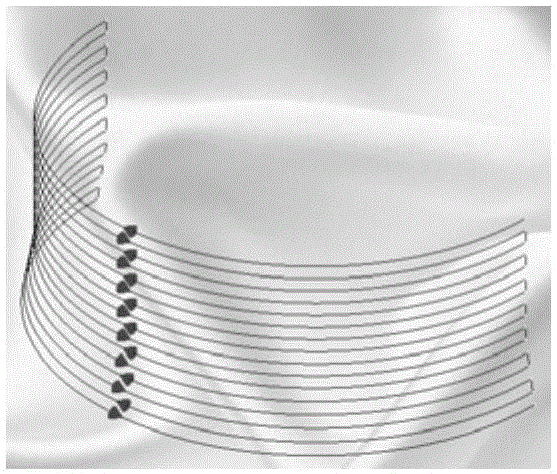
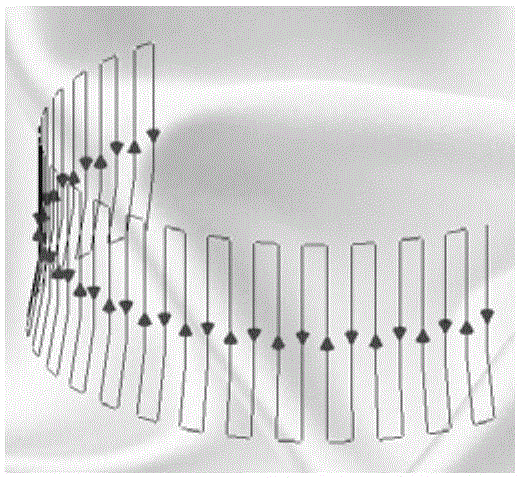
[0050] Plan and design 5 kinds of inspection tracks: cylinder weld inspection track, joint weld inspection track, intersection surface weld inspection track, pipe fillet weld inspection track, and bottom head weld inspection track, and then pass these 5 tracks A movement track of the manipulator at the weld seam of the container is generated, and the human-computer interaction subsystem controls the manipulator to complete the detection task through the motion control subsystem according to the dense movement points on the movement track.
[0051] Other steps and parameters are the same as those in Embodiment 1.
specific Embodiment approach 3
[0052] Specific embodiment 3: The difference between this embodiment and specific embodiment 2 is that the cylinder weld inspection track includes a circumferential inspection track and a radial inspection track;
[0053] Wherein, the cylinder weld inspection track formula is:
[0054] S i =Trans(0,0,R i )Rot(z,θ i )Trans(0,E R ,0)Rot(x,F A ·A T );
[0055] The above formula expands to:
[0056] S i = 1 0 0 0 0 1 0 0 0 0 1 - R ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More