

Bionic flexible body bending control system of quadruped robot
A quadruped robot, bending control technology, applied in the field of robotics, can solve problems such as no control scheme for flexible body bending, and achieve good control and less harmful substances
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] Below in conjunction with accompanying drawing and embodiment the present invention is described in further detail:
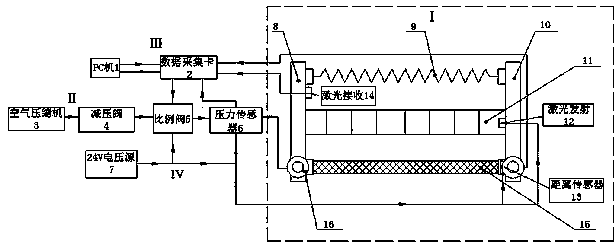
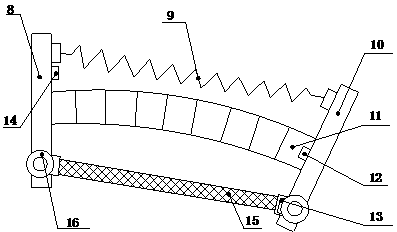
[0013] see figure 1 with figure 2 , a bionic flexible body bending control system for a quadruped robot, comprising a bionic flexible body mechanism I, a pneumatic circuit II, a flexible body bending control circuit III and a DC voltage source 7; the bionic flexible body mechanism I includes a front body 8, a spring 9. Rear body 10, bionic spine 11, pneumatic artificial muscle 15 and bearing 16; the pneumatic artificial muscle 15 is connected to the front body 8 and the rear body 10 through the bearing 16; the bionic spine 11 is fixed to the front body 8 and the rear body 10 center position; both ends of the spring 9 are fixed on the front body 8 and the rear body 10, the spring 9 and the pneumatic artificial muscle 15 are symmetrical about the bionic spine 11; the pneumatic circuit II includes an air compressor 3 and a pressure reducing valve 4 , a t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More