

Dynamic target position and attitude measurement method based on monocular vision at the end of manipulator
A technology of monocular vision and measurement method, applied in the field of visual measurement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
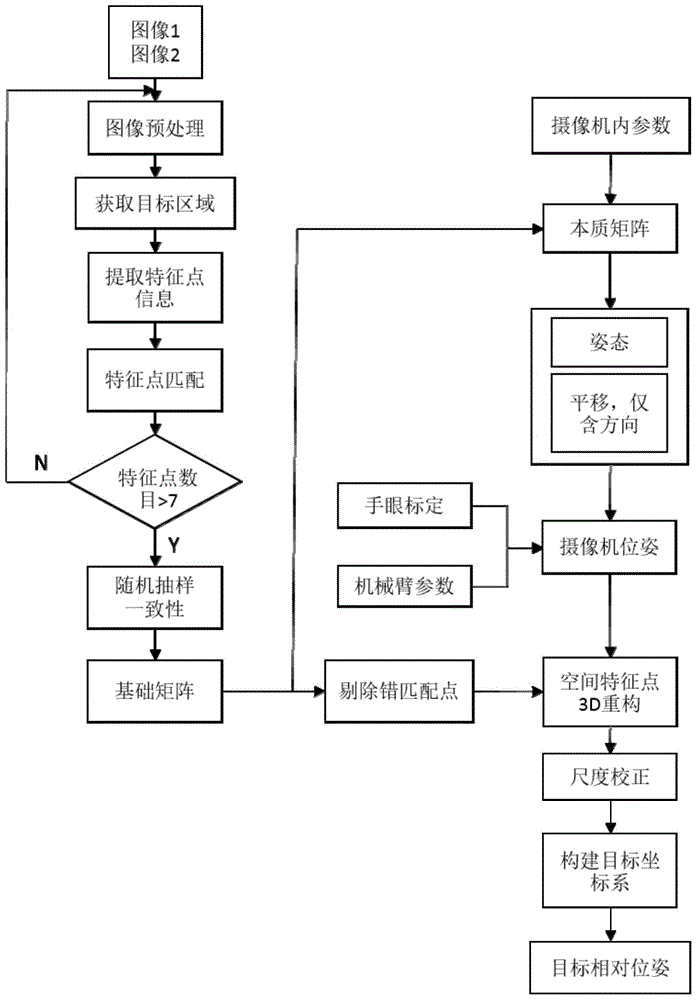
[0055] The dynamic target position and attitude measurement method based on the monocular vision at the end of the mechanical arm proposed by the present invention, its flow chart is as follows figure 1 shown, including the following steps:
[0056] (1) Let the plane coordinate system of the image captured by the camera be (u, v), and use Zhang Zhengyou’s checkerboard calibration method to obtain the internal parameter matrix M of the camera, M = f dx 0 u 0 0 f dy v 0 0 0 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More