

Hydraulic bionic muscle
A bionic muscle and hydraulic technology, applied in the field of bionics, can solve the problems of complex overall structure, difficult random transformation, and lack of flexibility.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
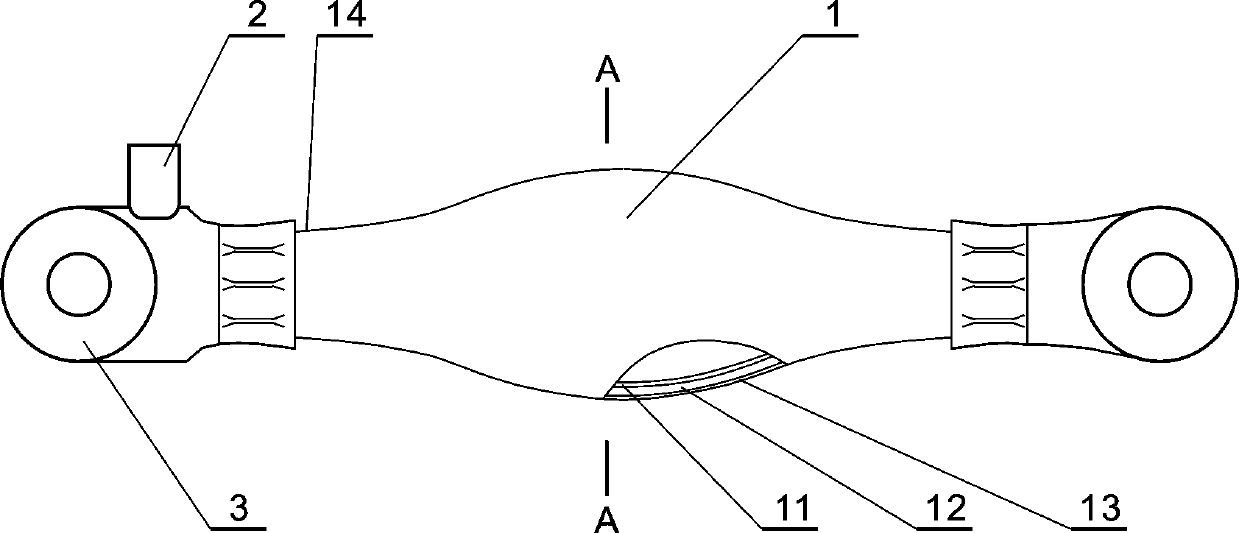
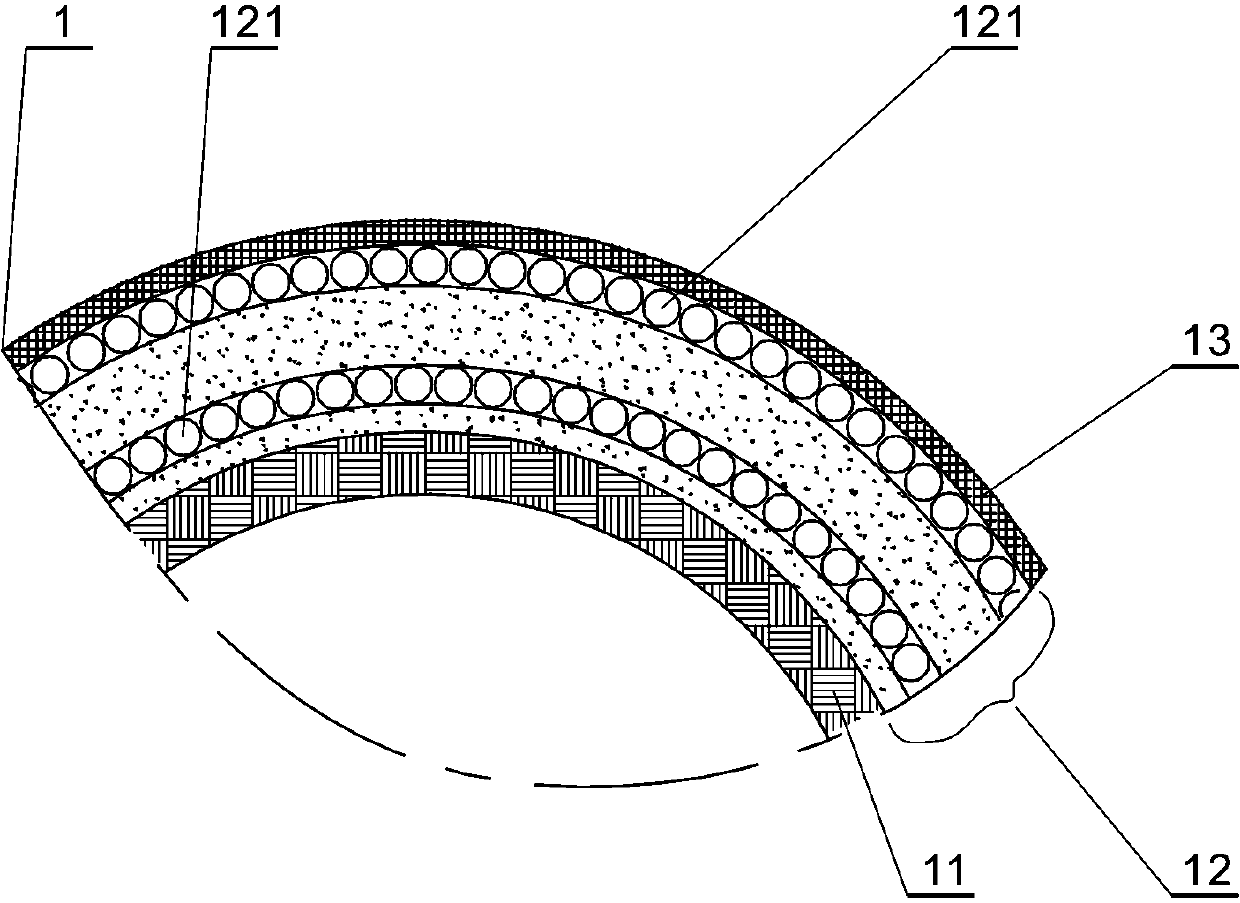
[0016] refer to Figure 1-2 , the present invention comprises elastic capsule 1, high-pressure oil port 2 and installation earring 3, and described elastic capsule 1 is the tubular body that two ends are provided with nozzle 14, and the wall of its elastic capsule 1 is made of inner layer 11, middle layer 12 and surface layer 13, the high-pressure oil port 2 is fixedly connected to the nozzle 14 at both ends of the elastic capsule 1, and the high-pressure oil port 2 is arranged on the installation earring 3; the inner layer 11 of the elastic capsule 1 is an elastic airtight layer, and the middle layer 12 It is an anisotropic heterogeneous material layer, and the surface layer 13 is a grid protective layer made of elastic material.
[0017] The anisotropic heterogeneous material layer is an elastic composite material layer provided with at least one high-strength modulus fiber layer 121, wherein the fibers of the high-strength modulus fiber layer 121 are arranged side by side i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More